无人机因其机动性强,对地形要求低的特点,在灾害室内救援中可以起到定位目标并实施救援的作用。而好的避障能力,可以很大程度上的减少因操作失误引发机身损坏,伤及人身和损坏建筑物的各种事故。
一、室内救援对避障技术的要求
无人机的室内救援任务主要有三大要求:其一,是飞行姿态的稳定性要求。空中机器人(即无人机)在执行任务过程中必须保持飞行轨迹平滑,高度基本不变,这也是对飞行器的基础要求;其二,是对障碍物的精准识别及规避;其三,要求无人机完成规避后恢复预定轨迹。

无人机输送救援物资
二、避障技术发展阶段及方式
无人机避障技术可简单分为三个阶段:感知障碍物并停止阶段;获取障碍物深度图像自主绕开阶段;建立区域地图合理规划路径阶段。这三个避障技术对应到几种传感器有:超声波、毫米波、激光红外、双目视觉、电子地图等。这几种避障方式技术原理不同,因此适用的场景也会因需而议。
常见三大传感器(左至右 激光雷达、红外、毫米波雷达)
三、四旋翼无人机避障案例
本案例基于室内竞赛方案,开发基于激光雷达的室内自主避障功能的四旋翼无人机,模拟存在障碍物情况下的室内环境,能实现全自动规避障碍,返回既定轨迹,达到目标位置的功能。
与实际救援场景不同,竞赛的主要难点在于,在没有足够参照物的条件下,如何在完成规避任务后,回到既定的轨迹上。为解决以上要求,可以将四旋翼避障无人机分为飞行姿态控制及解算模块、前向及对地激光测距模块、摄像寻线模块、光流定点模块四大部分。
传感器模块结构分布
为了保证四旋翼在自主避让障碍物过程中时刻保持在飞行区域中央位置,可以采用对地摄像头 OPENMV 以辅助对航线判定。当检测到左侧出现边际线时,飞行器向右修正;当检测到右侧出现边际线时,飞行器向左修正,以保障飞行航线。同时,利用北醒激光测距模块检测机体与障碍物之间的距离并通过其反馈值,实现四旋翼对障碍物的识别及机体与障碍物的距离保持。
智能化无人机离不开传感器的加持,相信科学运用各项传感器技术,能够助力无人机更快深入到安防、运输、建筑、农业等各个领域,迎来真正的无人机大时代。
那么,在平常的无人机项目设计中,我们应该如何加入主动避障功能,以便实现精确的定位,智能绕开障碍物呢?
噔噔蹬蹬~ 今天小编来给大家介绍一款超级好用的无人机避障神器——北醒 TFmini-S 测距 / 避障激光雷达。这是一款激光雷达传感器,拥有低成本、小体积以及低功耗三大优点,12 米内,每秒具有百次测量记录,盲区缩小至 10cm、无惧环境光、最高支持 1000Hz 输出、UART、I2C 以及 I/O 等多个通信接口可随时切换。此为 TFmini 升级版本,相比上一代具有更高的使用性能,适用更广泛的应用领域。
目前,这款产品正在发烧友论坛试用中心活动中,如果大家对产品感兴趣的话,可以申请免费试用哟~(添加文末客服小姐姐的微信,就可以申请啦~)
TFmini-S 是一款高性价比激光测距模组。在保证 12m 量程(@90%反射率)的基础上,TFmini-S 据有精度高、盲区小、低功耗等优势,在机器人、无人机等智能无人场景中,保证实时非接触式高精度测量体验。
产品规格表
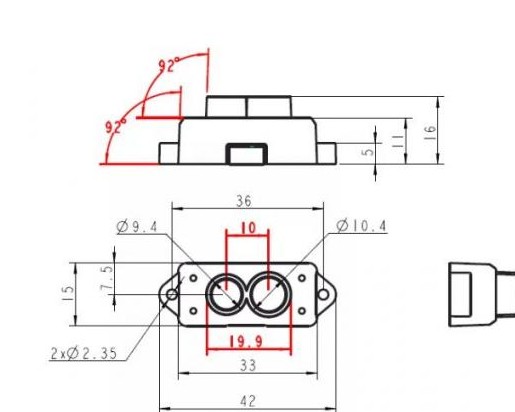
外观尺寸图
通信接口
可配置参数

产品图片