步进电机一般分为永磁式(PM)、反应式(VR)和混合式(HB)三种类型。目前,二相混合式步进电机的应用最为广泛。本设计采用的正是二相四线步进电机,步距角为1.8°,不细分。步进电动机基本原理与普通的永磁同步电动机是相通的,它是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角,而步进电机的驱动电路是根据单片机产生的控制信号进行工作。二相步进电机的内部结构如图1所示。
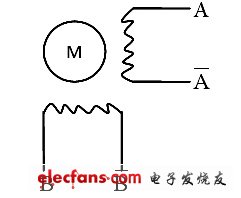
图1 二相步进电机的内部结构
由图1可知,该步进电动机有A和B两相绕组,由于感应子式步进电动机的特殊性。当在A、B两相绕组中通以对称的正旋交流电时,将产生圆形旋转磁场,而如果按照
的顺序依次对绕组通以确定幅值的直流电,将产生4步一循环的步进旋转定子磁场,步进角度为90°。为了充分利用电动机容量.增大输出力距,二相步进电动机整步运行通常采用
的通电顺序。此时步进电机正转,当通电顺序反转时,步进电机反转。