MoTIonchip是一种性能优异的专用运动控制芯片,扩展容易,使用方便。本文基于该芯片设计了一款可用于直流有刷/无刷伺服电机的智能伺服驱动器,并将该驱动器运用到加氢反应器超声检测成像系统中,上位机通过485总线分别控制直流有刷电机和无刷电机,取得了很好的控制效果,满足了该系统的高精度要求。
在传统的电机伺服控制装置中,一般采用一个或多个单片机作为伺服控制的核心处理器。由于这种伺服控制器外围电路复杂,计算速度慢,从而导致控制效果不理想。近年来,许多新的电机控制算法被研究并运用于电机控制系统中,如矢量控制、直接转矩控制等。随着这些控制算法的日益复杂,必须具备高速运算能力的处理器才能实现实时计算和控制。为了适应这种需要,国外许多公司开发了控制电机专用的高档单片机和数字信号处理器(DSP)。现在,通常使用的伺服控制器的控制核心部分大都由DSP和大规模可编程逻辑器件组成,这种方案可以根据不同需要,灵活的设计出性能很好的专用伺服控制器,但是一般研制周期都比较长。
MoTIonChip的特点
MoTIonChip是瑞士Technosoft公司开发的一种高性能且易于使用的电机运动控制芯片,它是基于TMS320C240的DSP,外围设置了许多电机伺服控制专用的可编程配置管脚。TMS320C240是美国TI公司推出的电机控制专用16位定点数字信号处理器,其具有高速的运算能力和专为电机控制设计的外围接口电路。MotionChip很好的利用了该DSP的优点,并集成多种电机控制算法于一身,以简化用户设计难度为目的,设计成为一种新颖的电机专用控制芯片。MotionChip有着集成全部必要的配置功能在一块芯片的优点,它是一种为各种电机类型进行快速和低投入设计全数字、智能驱动器的理想核心处理器。具有如下特点:
·可用于控制5种电机类型:直流有刷/无刷电机、交流永磁同步电机、交流感应电机和步进电机,且易于嵌入到用户的硬件结构中;
·可以选择独立或主从方式工作,并可根据需要,设置成通过网络接口进行多伺服控制器协同工作;
·全数字控制环的实现,包括电流/转矩控制环、速度控制环、位置控制环;
·可实现各种命令结构:开环、转矩、速度、位置或外环控制,步进电机的微步进控制,并可实现控制结构的配置,其中包括交流矢量控制;
·可以配置使用各种运动和保护传感器(位置、速度、电流、转矩、电压、温度等);
·使用各种通讯接口,可以实现RS232/RS485通讯、CAN总线通讯;
·基于Windows95/98/2000/ME/NT/XP平台,强大功能的IPM Motion Studio 高级图形编程调试软件:可通过RS232快速设置,调整各参数与编程运动控制程序。其功能强大的运动语言包括:34种运动模式、判决、函数调用,事件驱动运动控制、中断。因此便于开发和使用。
·可以通过动态链接库TMLlib,利用VC/VB实现PC机控制;也可以与Labview和PLC无缝连接,通过动态链接库,用户可以在上层开发电机的控制程序,研究控制策略。
运动控制系统设计
本文是以MotionChip为控制器核心,直流无刷电机/有刷电机/永磁同步电机为控制对象进行伺服驱动器设计。设计指标为:适应12— 36V宽范围直流母线电压输入,工业标准5V逻辑电源输入,最大输出电流3A,峰值电流6A。在进行伺服控制器设计之前,根据MotionChip的特点和伺服电机的特性进行总体功能设计如下:
·采用位置环、速度环、电流环的三环结构;三环都采用PID调节器;电机参数设置采用计算机辅助计算和工程整定相结合的办法;
·具有通用伺服控制器接口,并可利用提供的人机接口进行独立参数设置,有网络通讯接口进行独立参数设置,有网络通讯接口方便外部监视和控制。
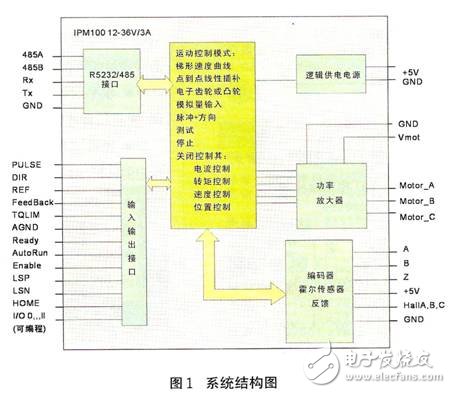
伺服系统的总体系统结构可以分为:MotionChip最小系统、驱动电路、电流反馈检测、外部控制接口、通讯接口等,如图1所示。伺服驱动器的硬件结构分为2个主要部分:驱动电路部分:主要包括逆变桥、前置驱动、电流检测;
控制电路部分:包括反馈检测、外部控制接口、通讯接口、MotionChip最小系统。