当我们谈论无人驾驶时,人工智能在其中又将扮演着怎样的角色?
着现代高新技术的迅速发展,数字化、信息化和智能化越来越多的应用到人类社会的生产、生活的各个方面,曾经只能在科普小说中看到的智能无人驾驶汽车已经不再是虚幻的,人们在不久的将来将能在现实中看见智能无人驾驶汽车。现在集各种高新技术于一体的汽车,其性能、舒适性、安全性已经取得很大进步。智能无人驾驶汽车通常具有一款高智能的计算机,它能够接收各种智能传感器传来的周围环境及汽车自身的各种信息并能高效迅速的综合整理,然后把信息传递给汽车的执行系统,从而实现自动驾驶、智能控制等功能。
车辆实现自动驾驶的技术原理
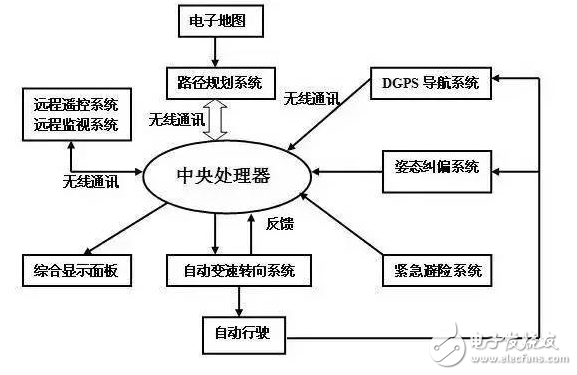
人驾驶汽车运行时,在车载显示屏电子地图上点出目的地,并且设计行驶路径,将做好的电子地图确认自动导入中央处理器中,中央处理器根据地块边界规划出合理的行驶路径。
在系统中应用角度传感器、电动机转速传感器、位置传感器、压力传感器等传感器测量行车信息,并将行车信息转换为电信号传递给中央处理器进行运算,再由中央处理器发出指令控制自动变速转向机构,构成闭环系统,实现对汽车驾驶的智能控制。
无人驾驶中的人工智能技术(Drive.Ai)
1、环境感知,这是计算机视觉领域的研究重点,常说的slam就是指这个,基于激光雷达的slam系统目前已经能较好的进行地图定位,局部环境地图构建
2、标识识别,包括车道识别交通标志识别(比如红绿灯)车辆行人识别和运动跟踪,在这里,CNN(ConvolutionalNeuralNetwork,卷积神经网络)技术成了目前最好的技术,标识识别是无人驾驶行为决策的基础
cnn技术也是对激光雷达的一个很好的补充,因为激光雷达是低像素,不能很好的识别障碍物
3、行为决策系统技术
行为决策系统或者叫驾驶决策系统,包括全局的路径规划导航和局部的避障避险,以及常规的基于交通规则的行驶策略(最简单的,让车保持在车道内),使用到的技术分成三类
1)、基于推理逻辑和规则的技术
全局路径规划导航的A*,D*算法,局部避障的dwa算法,常规的最优控制数学办法(比如多目标决策),以及基于交通规则的fsm规则引擎都属于这类技术
2)、快速优化的遗传算法
当目前有多个策略选择时,如何选择最好的目标或策略,基于线性规划或动态规划的数学办法存在计算速度缓慢,很多情况下无法建模或计算量过大无法计算,这就是遗传算法发挥作用的地方
3)、神经网络技术
利用神经网络来进行自动驾驶训练是最新的研究热点,也就是常说的,让神经网络学会像人类一样开车是很振奋人心的目标
但是,神经网络的问题在于它是不透明的,是个黑盒系统,是不可解释的,基本你无法说出训练模型里一个节点的值为什么是0.1而不是0.5,这是由神经网络的特点决定的,另外,利用训练数据训练出来的很好的模型到了新的环境能不能发挥同样好的作用也是疑问
有一种最简单的设计无人驾驶系统的办法,就是只用神经网路来做一切控制,我们只需要用大量的数据来训练它,这样就不用写复杂的控制策略算法代码了,我们只要训练好神经网络,然后用很少的代码让它运行就可以了,但是,在神经网络的可解释性不能解决前,完全基于神经网络的自动驾驶系统很显然是不能让人信服和舒服的
所以无人驾驶系统中基于推理逻辑的控制策略仍然是很重要的,让基于推理逻辑的白盒控制系统和基于神经网络的黑盒控制系统协同工作,是最为可行的方向
4、车辆控制系统技术
车辆控制系统技术除了传统的pid控制外,在无人车系统也越来越多的引入了神经网络模糊控制
无人驾驶(自动驾驶)系统常见的驾驶决策控制策略
1、全局导航路径规划a*,图像识别神经网络和即时驾驶和避障dwa相结合的控制策略
这是传统的无人驾驶控制策略,全局路径导航使用常规的a*算法(也可以使用其他的),车辆摄像头的图像经过神经网络处理,提取出车道交通标识和车辆行人信息,然后以这些信息作为输入,利用vfh/dwa算法进行即时驾驶和避障控制,比如变道减速刹车等等
谷歌无人车自动驾驶系统使用的就是这种控制策略
2、全局路径规划和即时驾驶和避障神经网络相结合的高度智能的控制策略
全局规划还是使用和策略一相同的算法,但是在即时驾驶和避障中,完全使用了神经网络技术,把从摄像头捕捉到的原始像素图特征作为神经网络的输入端,输出端为为汽车的操控命令。我们不再从原始像素图提取车道信息,交通标识,车辆行人标识,这一切都交给神经网络自动识别,最后输出的是转向循迹减速刹车等汽车控制命令,神经网络使用了数以亿计的节点。