20世纪80年代后, MCU和MPU开始在汽车中被广泛使用,汽车电子化进程开始逐年加快。近几年,智能化和网联化在汽车行业兴起,汽车电子化程度更上一层楼。据统计,当前汽车的创新70%来源于汽车电子产品,电子产品成本占整车比例已经从上世纪70年代的4%,成长到现在的30%左右。未来仍将进一步提升,预期到2030年,该比例将可达到50%。在电子零部件越来越多,信息传输量越来越大的需求促动下,汽车网络化势头已经不可挡。因此,传统的电气网络已无法适应现代汽车电子系统的发展,新型汽车总线技术应运而生。
图|汽车总线
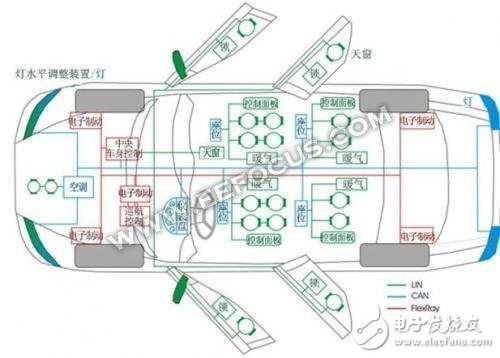
目前汽车上普遍采用的汽车总线有局部互联协议LIN和控制器局域网CAN,正在发展中的汽车总线技术还有高速容错网络协议FlexRay、用于汽车多媒体和导航的MOST以及与计算机网络兼容的蓝牙、无线局域网等无线网络技术。
在这里,与非网编辑主要讲解一下传统三大总线CAN、LIN、FlexRay和汽车总线“新贵”以太网,看一下每一个汽车总线的特点、优势和未来发展趋势。
CAN总线
CAN-BUS即CAN总线技术,全称为“控制器局域网总线技术(Controller Area Network-BUS)”。Can-Bus总线技术最早被用于飞机、坦克等武器电子系统的通讯联络上。将这种技术用于民用汽车最早起源于欧洲,在汽车上这种总线网络用于车上各种传感器数据的传递。
图|CAN总线
汽车上面布满了各种控制单元,越是高级的汽车,其控制单元越多,控制系统越复杂。每个控制单元都可看做一***立的电脑,它可以接受信息,同时能对各种信息进行处理、分析,然后发出一个指令。比如发动机控制单元会接受来自进气压力传感器、发动机温度传感器、油门踏板位置传感器、发动机转速传感器等等的信息,在经过分析和处理后会发送相应的指令来控制喷油嘴的喷油量、点火提前角等等,其它控制单元的工作原理也都类似。在这里可以给大家做一个比喻,车上的各种控制单元就好比一家公司各个部门的经理,每个部门的经理接受来自自己部门员工的工作汇报,经过分析作出决策,并命令该部门的员工去执行。
部分汽车的控制单元之间的所有信息都通过两根数据线进行交换,这种数据线也叫CAN数据总线。通过该种方式,所有的信息,不管信息容量的大小,都可以通过这两条数据线进行传递,这种方式充分的提高了整个系统的运行效率。
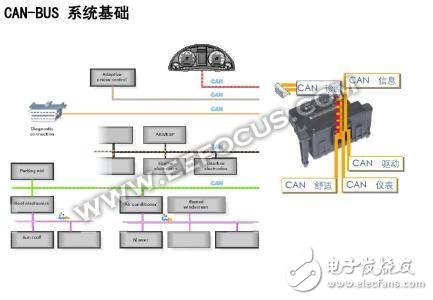
图|CAN-BUS
总线系统之所以称作为CAN-BUS,其实也是因为它的工作原理与运行中的公共汽车很类似。每个站点相当于一个控制单元,而行驶路线则是CAN数据总线,CAN数据总线上传递的是数据,而公共汽车上承载的是乘客。某个控制单元接收到负责向它发送数据的传感器的信息后,经过分析处理会采取相应措施,并将此信息发送到总线系统上。这样此信息会在总线系统上进行传递,每个与总线系统连接的控制单元都会接收到此信息,如果此信息对自己有用则会存储下来,如果对其无用,则会进行忽略。
目前汽车上的CAN数据总线连接方式主要有两种,一种是用于驱动系统的高速CAN总线,速率可达到500kb/s,另一种是用于车身系统的低速CAN总线,速率为100kb/s。当然对于中高级轿车还有一些如娱乐系统或智能通讯系统的总线,它们的传输速率更高,可以超过1Mb/s。
接下来,我们看一下CAN总线有哪些优势:
·比传统的布线方式的数据传输速度更高。
·比传统布线方式要节省线束,降低了车身重量,同时优化了车身的布线方式。
·以CAN总线方式连接的控制单元中有一个发生故障,其它控制单元仍可发送各自的数据,互不影响。
·CAN数据总线为双线制,如果有一条发生故障,CAN系统会转为单线运行模式,提高了整车的稳定性。
·CAN系统的双线在实际中是像“麻花”一样缠绕在一起的,这样可以有效的防止电磁波的干扰和向外辐射。
·基于CAN总线系统可以实现更丰富的车身功能。
CAN总线是当前汽车总线应用最广的一种,但是由于自身安全性等原因,人们已经开始为CAN总线寻求合格的替代者, FlexRay、以太网是这个过程中呼声较高的。
LIN总线
LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
图|车载网络示意图
LIN总线是面向汽车低端分布式应用的低成本,低速串行通信总线。它的目标是为现有汽车网络提供辅助功能,在不需要CAN总线的带宽和多功能的场合使用,降低成本。
LIN联盟成立于1999年,并发布了LIN01.0版本。最初的成员有奥迪、宝马、克莱斯勒、摩托罗拉、博世、大众和沃尔沃等。
LIN总线相对于CAN的成本节省主要是由于采用单线传输、硅片中硬件或软件的低实现成本和无需在从属节点中使用石英或陶瓷谐振器。这些优点是以较低的带宽和受局限的单宿主总线访问方法为代价的。
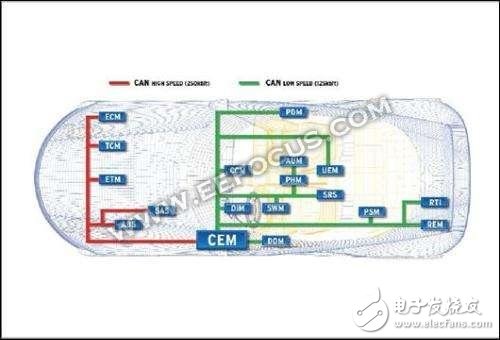
图|汽车总线示意图
LIN总线上的所有通讯都由主机节点中的主机任务发起,主机任务根据进度表来确定当前的通讯内容,发送相应的帧头,并为报文帧分配帧通道。总线上的从机节点接收帧头之后,通过解读标识符来确定自己是否应该对当前通讯做出响应、做出何种响应。基于这种报文滤波方式,LIN可实现多种数据传输模式,且一个报文帧可以同时被多个节点接收利用。
LIN总线是CAN总线的副手。未来,或许将随着CAN总线一起退出历史的舞台。
FlexRay
FlexRay是一种用于汽车的高速、可确定性的,具备故障容错能力的总线技术,它将事件触发和时间触发两种方式相结合,具有高效的网络利用率和系统灵活性特点,可以作为新一代汽车内部网络的主干网络。FlexRay是汽车工业的事实标准(facto standard)。
图|FlexRay
Flexray的拓扑结构多样,既可以像CAN总线一样使用线型结构,也可以使用星型结构。中心节点负责转发信息。当除中心节点外的某个节点损坏或线路故障时,中心节点可以断开与该节点的通信。但当中心节点损坏时,整个总线便无法工作。可以将多个星型总线的中心节点连接起来。
Flexray和CAN总线最本质的区别是总线分配的方式不同。CAN总线是采用CSMA/CA机制。各节点会一直监听总线,发现总线空闲时便开始发送数据。Flexray用的是TDMA(Time Division Multiple Access) 和FTDMA(Flexible Time Division Multiple Access)两种方法。Flexray将一个通信周期分为静态部分、动态部分、网络空闲时间。静态部分使用TDMA方法,每个节点会均匀分配时间片,每个节点只有在属于自己的时间片里面才能发送消息,即使某个节点当前无消息可发,该时间片依然会保留(也就造成了一定的总线资源浪费)。在动态部分使用FTDMA方法,会轮流问询每个节点有没有消息要发,有就发,没有就跳过。静态部分用于发送需要经常性发送的重要性高的数据,动态部分用于发送使用频率不确定、相对不重要的数据。
图|FlexRay
Flexray相比较于CAN总线要复杂许多,安全性相对较高。但是,Flexray总线也有其弊端,就是造价成本过高,除了德系车厂在量产车上使用过,其他国家极少见。随着汽车电子化程度的增加,对总线带宽的要求也越来越高。用Flexray来取代原来普遍使用的CAN总线是不现实的,因为成本实在太高。
以太网
新的汽车功能,如自动泊车系统、车道偏离检测系统、盲点检测和高级信息娱乐系统等引发了对新的数据总线需求。显然,未来我们需要的是更加开放、高速,且易于与其他电子系统或者设备集成的车载网络,同时有助于减少功耗,线束重量和部署成本。
图|多功能汽车系统示意图
传统车载网络支持的通信协议较为单一,而车载以太网可以同时支持AVB、TCP/IP、DOIP、SONIP等多种协议或应用形式。其中,Ethernet AVB 是对传统以太网功能的扩展,通过增加精确时钟同步、带宽预留等协议增强传统以太网音视频传输的实时性,是极具发展潜力的网络音视频实时传输技术。SOME/IP(Scalable Service-Oriented MiddlewarE on IP)则规定了车载摄像头应用的视频通信接口要求,可应用于车载摄像头领域,并通过API实现驾驶辅助摄像头的模式控制。
作为AVB协议的扩展,车载时间敏感网络(TSN, ?Time-Sensitive Networking)则引入时间触发式以太网的相关技术,能高效的实现汽车控制类信息的传输。此外,1Gbit 速率通信标准的车载以太网同时还支持 POE(Power Over Ethernet)功能和高效节能以太网(EEE, Energy-Efficient Ethernet)功能,POE 功能可在双绞线传输数据的同时为连接的终端设备供电,省去了终端外接电源线,降低了供电的复杂度。
图|车用以太网
当前,以太网和CAN的连接通过以太网网关来实现。以太网目前还不是用来