针对道路中急转弯处因盲区会车的信息采集、信息反馈、信息处理失误而引发交通事故的问题,设计了新型实用的急转弯会车提示预警系统。以TIMSP430MCU和CC1101低功耗多通道无线射频内核的CC430F5137芯片为控制核心,由地磁传感器检测采集车辆信息,系统中的两块大面积电子显示屏给出信息告知预警,前方车况及时反馈到来向和去向的驾驶人员。道路实地模拟测试表明该系统对于车辆在弯道处的良好检测率,弥补了传统警示标志的不足。急转弯盲区道路安全解决方案在智能化交通上具有广阔的应用前景。
随着社会对文明驾驶和交通安全的日益重视,人们不断提高车辆驾驶的安全性和智能交通设施建设。其中我国山区公路地形复杂,路窄、弯道多、坡陡。车辆遇到弯道时,驾驶者对前方交通状况缺乏足够的了解,短暂的应变时间会使司机发生误判从而导致交通事故。急转弯地形导致事故的问题亟待解决。
交通领域国内外专家学者针对这一问题主要研究出两种方法。第一种是将弯道地形作为单独研究单元,对弯道进行线形设计与优化设计,公路弯道道路线形与交通特性分析显然是治标不治本的途径。第二种就是科学改善道路限速和交通安全设施,增强驾驶人安全驾驶意识及规范车辆上路合格检测管理。虽然近些年我国交通管理部门和路政机关在弯道地形区域预先设立了多种多样的提示标语与警示标志,但避免交通事故的效果还是不够理想。
针对急转弯、陡坡弯道等不利地形的交通安全问题,迫切需要采用智能化交通系统等先进技术对道路交通进行即时动态的侦测、警告、引导和管制,实现道路交通安全有序、保障驾驶人生命和财产安全的目标。为此,本文设计了一种急转弯处会车的智能提示预警系统,拟解决急转弯盲区道路会车的问题,增强急转弯地形安全会车的可靠性,减少事故发生的可能性。
1急转弯会车预警系统的设计方案
1.1系统设计的主要构成部分
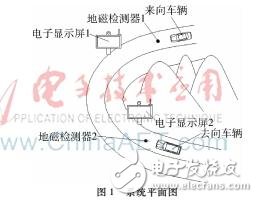
急转弯会车提示预警系统主要有两个部分,在急转、弯处一定距离的前后位置分别设置两个地磁传感器,电子显示屏设置在弯道的入口处和出口处。整体系统平面图如图1所示,包括一对内车道的地磁传感器检测器、来向车辆、去向车辆以及一对电子显示屏。内车道上安装有所述车辆地磁检测器2,地磁检测器2位于去向车辆的前方,地磁检测器2的另一侧是电子显示屏2。在急转弯道路的另一个方向,来向车辆在外车道驶来,此时来向车辆正处于去向车辆的盲区。急转弯会车提示预警系统给出安全会车的解决方案:来向车辆的前方路面上设置有地磁检测器1,地磁检测器1的另一侧是电子显示屏1,电子显示屏1上面显示去向车辆信息,电子显示屏2上面显示来向车辆信息。电子显示屏提前告知驾驶人员前方车况,提醒驾驶人员急转弯道后方的车辆信息,便于驾驶人员提前减速,保证弯道内驾驶的安全性。
1.2系统设计的可行性对比分析
与当前普及的广角镜相比,弯道会车预警系统不受视野角度的限制,能够适应各类复杂路况,对于夜间行车,大雾阴雨天气的弯道会车有着明显的优势,可根据路况需要合理配置传感器及显示模块的方位,使得驾驶员能够提早接收前方车况信息。若有超速或低速拐弯的车辆驶来时,驾驶员也能提前获知弯道盲区的来车情况,从而及时做出减速或规避等避险措施。
地磁传感器检测距离范围覆盖整个路面宽度,传感器提前检测到车辆,能够及时在系统显示屏上预告,从而使司机能够在进入弯道会车之前就正确得到来车信息提示。在弯道入口处,由于驶入弯道和驶出弯道的汽车经过两个地磁传感器,引起两个地磁传感器扰动信号变化,从而单片机CC430F5137(CC430)可识别出车辆驶入和驶出弯道时的速度。通过单片机内部的计时器,检测车辆引起扰动所用时间,从而计算车辆速度。显示模块实时发布车辆来向和车速,使驾驶人员依据电子屏反馈信息及时减速或停车避让,避免会车失控的事故发生。
2系统的硬件模块和软件程序设计
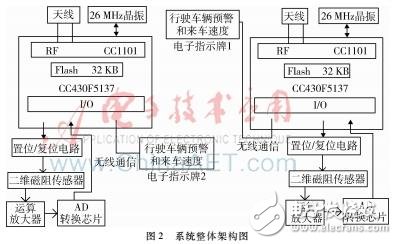
系统的硬件设计主要用到TI的CC430F5137芯片。芯片内部以MSP430MCU为控制核心,设置ADC采集地磁传感器检测模块数据,基于CC1101低功耗多通道无线射频内核,通过外设天线与对应的电子液晶显示屏无线通信,其中点对点通信由外设拨码开关设定地址配对建立连接,系统整体架构图如图2。
2.1CC430MCU主控模块与RF无线通信模块
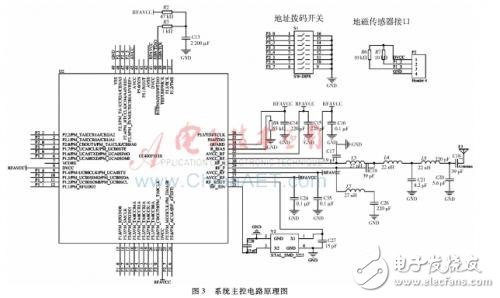
CC430MCU主控模块是车辆信息实时采集的硬件基础。系统主控电路原理图如图3所示。MCU具有超低功耗,具有高达25MHz的峰值执行性能,主动模式功耗仅仅为160μA/MHz,待机模式(LPM3RTC模式):2μA,关闭模式
(LPM4RAM保留):1μA,处理器8MHz仅1.3mA。超低功耗的运行模式可增加地磁检测器的电源的使用寿命,埋于地下的地磁检测器暗盒里可以用独立包装的电池作为采集系统的电源供给。
CC430芯片外部振荡电路使用26MHz晶振,程序设计通过读取AD的模块数值用一个定时器外部中断控制。程序调试的下载端口采用最常用的标准调试接口JTAG接口。射频收发器CC1101采用基于433MHz的载波频率,配以合适的阻抗电路。
2.2基于地磁传感器的车辆检测器模块
放有地磁检测器附近区域的地球磁场可以看成是均匀磁场空间,车辆一般都有铁磁体金属物质,均匀磁场就会发生扰动,地磁检测器会对磁场产生的扰动进行采集和分析。大量科学实验表明,这种扰动对于磁阻传感器监测是很敏感的,由此可以判断车辆的存在,更加精确的磁场检测甚至可以测出车辆引起扰动的时间。实验测试运动小车对磁场的扰动,发现汽车经过地磁传感器上方时,磁场发生扰动,具体表现为地磁场强度在Z轴方向明显发生一定幅度的变化。车辆驶离地磁检测器附近区域,地球磁场会恢复之前状态。通过磁场强度的扰动变化,就可以确定车位有无停车。单一的地磁检测会有一定错误和遗漏,系统可以采用增加光敏传感器、图像识别等其他辅助检测手段,提高车速检测的准确性,该文不再赘述。
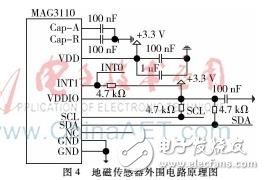
会车预警系统地磁检测器主要由飞思卡尔公司的三轴磁阻信号传感器MAG3110组成。内置高性能锂亚硫酰氯电池供电,主控芯片采用低功耗运行方式,电池为整个地磁采集功能电路板供电的工作寿命达3~5年。地磁车辆检测器固定于路口中间区域,采用高强度ABS和PC材料注塑成型,有防水、抗酸碱腐蚀、抗冲撞功能。以芯片CC430为主控电路水平放置于距离地磁检测功能印制电路板一侧0.15m的地方,以防附近电路板对地磁测量的干扰。地磁传感器外围电路原理图如图4所示。
2.3系统软件程序设计与优化
系统低功耗器件的硬件设计最大效率地利用电池的能量,延长地磁检测器和主控开发板的使用寿命。与此同时,灵活的电源管理软件程序控制CC430单片机以及高效的纠错矫正能力十分重要。
地磁传感器的数据采集由单片机端口控制实现,空闲时段均处于高阻态,数据采集时为输入或输出状态。中心接收节点的MCU状态可以由程序设计进行科学节能管理。间歇性地接收探测节点发来的数据,可使CPU同样常处于低功耗模式,LPM3电压为3V,频率为32768Hz,该模式下的工作电流小于2μA。
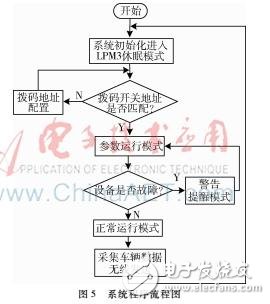
维护人员通过软件首次由CC430单片机对地磁检测器参数(包括产品序列号、射频的频段、发送功率等)进行配置。通过人工初次进行八路拨码开关地址配置,触发进入固定频段的配置模式,实现地磁检测器2与电子显示屏1(地磁检测器1与电子显示屏2)参数配置和无线数据链接,完成车辆监测、无线互传、电子屏显示的基本功能。软件设计无线通信部分采用SimpliciTI协议栈设计,系统程序流程图如图5所示。系统遇到外设破坏,尤其是地磁传感器检测功能出现异常(抑或单片机端口采集异常)时,CC430单片机将进入警告提醒模式,及时把故障反馈给电子显示屏,便于设备维护人员及时检修。