随着汽车工业的发展,汽车电子部件越来越多地被应用于现代汽车中,为汽车提供了更好的安全性、舒适性和经济性。以前汽车普遍采用手摇曲柄的方式使车窗玻璃上升或下降,现今轿车很多都安装了电动车窗。而具有防夹功能的电动窗应用于汽车始于20世纪90年代,当玻璃上升途中遇到人力障碍时会自动识别而反向运行,防止乘员夹伤,实现防夹功能。由于该功能的重要性,在欧美新车型上都已成为标准配置,目前国内新推出的高端车型已成为标准配置。由于低成本方案的推出,经济型轿车也开始逐渐配备应用这一功能。而车窗位置判断准确是车窗的防夹功能的正常实现的前提。
1准确判断电动窗位置的重要性
法规规定,具有自动上升功能的车窗必须配备自动防夹功能。即当车窗在自动上升过程中如果,车窗玻璃遇到障碍物。必须做出判断后反转,并且防夹力要小于100 N。而法规规定的防夹区域是4 mm~200 mm(如图1)。这就要求系统对车窗的位置进行准确的计算和判断。
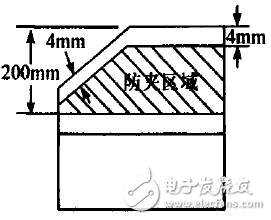
图1 法规防夹区域
如果车窗位置计算不准确会有以下后果:
1) 比如车窗在上升过程中在防夹区域内,如果车窗位置计算不准确,系统判断为防夹区域外。车窗可能遇到障碍物,但是不做防夹反转。而是继续上升玻璃。障碍物如果是人,导致把人夹伤。
图2 防夹车窗
2) 车窗自动上升过程中,如果车窗位置计算不准确,车窗就会到顶部位置认为在防夹区域内,遇堵后反转。导致车窗不能关满。
3) 车窗在上升过程中,由于存在车窗重量和窗框阻力等因素,在每个位置上的阻力大小是不一样的。因此判断车窗位置也是相当重要的。
由以上三点分析可知,车窗位置判断的准确在防夹功能中,既有非常重要的意义。
2电动窗位置判断的原理
从机械的角度讲,电动车窗砸升降时,电机旋转会带动钢丝绳的运动,从而带动车窗的上下开闭。电机每旋转一定的角度,钢丝绳就相应地运动一定行程,因此车窗运动的行程与电机的旋转的圈数成线性关系。通过计算电机旋转的圈数,可以间接算出车窗的位置。
2.1霍尔原理
电机的旋转会使得霍尔传感器产生脉冲信号。玻璃位置的检测是通过对控制模块中的霍尔传感器发出的方波进行计数来实现。软件设计中通过单片机芯片的输入捕捉功能记录车窗运行过程中的脉冲个数,通过学习,将车窗的上密封条记为位置0,而下密封条为最大位置。在车窗上升过程中将位置计数器减1,上升到顶时位置计数器清0,下降时位置计数器加l。因此,可按照要求确定防夹区界限对应的位置计数器的值。通过对位置计数器的值的检测可以间接判断玻璃的位置。
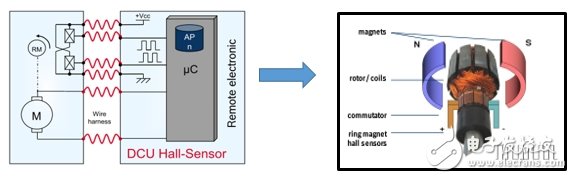
图3 霍尔原理
脉冲计数方式的关键问题在于位置记录要精确,但在试验中却存在电机切断电源后依旧会发出几个脉冲的问题,这几个脉冲由惯性造成,而且不同的玻璃升降器产生的脉冲个数不同。这些脉冲对车窗位置影响随情况的不同而不。在车窗上下两端堵转时,这些脉冲不太可能造成车窗位置的变化,而在中间位置停止时则有可能造成车窗位置移动,特别是下降途中人为停止时对车窗位置的影响更大。为了减小这种影响,与电机通电运动时位置计数一样,在算法中捕捉这些脉冲。如果当前为下降状态,则对电机断电后产生的脉冲进行位置加法操作,如果当前为上升状态,则对电机断电后产生的脉冲进行位置减法操作。
2.2纹波原理
电机有磁极、转子线圈、换向器组成。根据右手定律转子线圈通电后再磁极磁场的作用下产生运动。运动到磁场边缘是磁场变弱,电动势减小,电流增大。换向器改变转子线圈的电流方向,重新进入磁场电动势增大,电流减小。转子线圈不断转动、电动势和电流不断变化,从而纹波不断产生。所以纹波是电机的固有特性,通过计算纹波的个数就能计算出转子换向的次数,就能计算出窗户的相对位置,结合时间就能得出电机的转速。
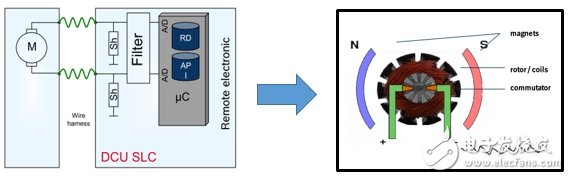
图4 纹波原理