车辆自动驾驶的实现离不开洞察周围环境的“眼睛”,车载毫米波雷达正是这样的一副“慧眼”。它不仅看得远,更能穿透云雾烟尘,无惧黑夜,成为目前前装量产应用最广泛的智能环境感知传感器。今天就带大家走近毫米波雷达,了解它的分类和原理,以及测试实验方法。
1 毫米波雷达的分类和ADAS应用
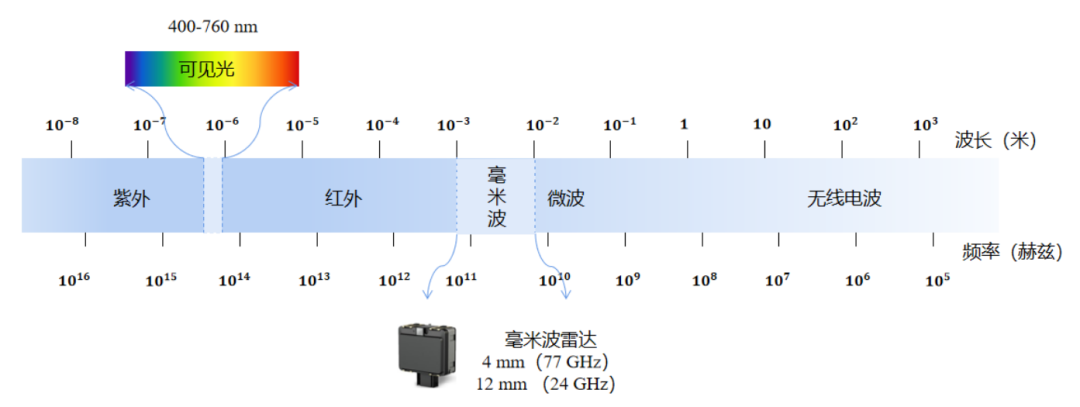
车载毫米波雷达是一种通过发射电磁波并接收目标的反射回波来测量目标距离、方位和速度的探测器。目前车载毫米波雷达发射的电磁波频率在24GHz,77GHz至79GHz几个频段,波长在1mm~0.1cm之间,也被称为毫米波。采用这个频段的电磁波可以形成较窄的指向性更好的波束,提高雷达对目标的分辨力,同时具备了很强的穿透沙尘烟雾和雨雾的能力。
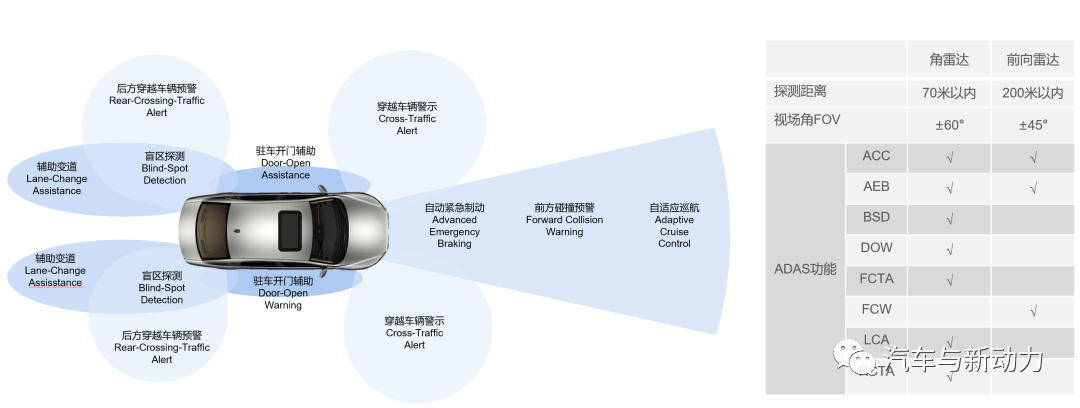
从探测距离和安装位置上,可以将车载毫米波雷达分为前向雷达和角雷达。前向雷达的探测范围在200米以内,视场角可达到±45°,安装在车辆前端保杠后侧。角雷达的探测距离在70米左右,视场角可达±60°,通常安装在车辆的四个角上。目前基于毫米波雷达的自动驾驶功能包括了自适应巡航、自动紧急制动、前方碰撞预警、盲区探测、变道辅助等。
2 毫米波雷达的原理
车载毫米波雷达硬件可以分为射频前端和低频基板两部分。射频前端发射调制方式为调频连续波的电磁波,电磁波被目标物反射后再次被射频前端接收。通过比较发射波形和接收波形之间的频率变化,可以计算出电磁波从发射到接收之间的时间差,进而计算出目标的距离。同时由于运动的目标会引起多普勒频偏,通过低频基板的信号处理单元将接收到的信号进行傅里叶变换,可以获得目标的速度信息。车载毫米波雷达对于目标方位角的探测基于目标反射的雷达波到达不同接收天线的相位差。通过多发多收的MIMO天线阵列设置,车载毫米波雷达可以探测目标的水平方位角甚至垂直方位角。
3 车载毫米波雷达的测试
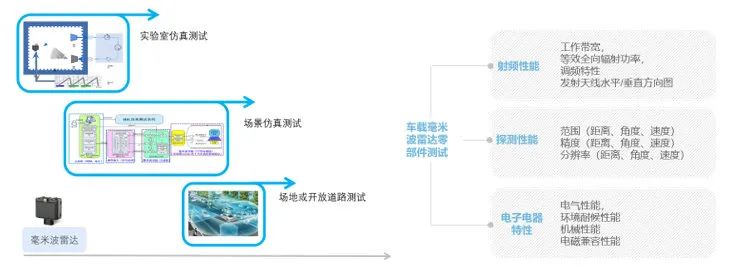
车载毫米波雷达发射的电磁波看不见摸不着,如何来检测它的性能呢?毫米波雷达的测试可以根据产品研发周期可以分为实验室仿真测试,场景仿真测试和场地或开放道路测试。车载毫米波雷达零部件测试涵盖射频性能、探测性能和电子电器特性等。上海汽检是全国少数支持车载毫米波雷达整机全品类项目测试的国家质检中心之一。
实验室仿真测试是检测车载毫米波雷达射频性能和探测性能的常用方法。测试系统包含电波暗箱、转台和雷达目标模拟器以及频谱分析仪构成。通过雷达目标模拟器仿真不同距离、方位和速度的目标,具有高精度、高稳定性、可重复性高的特点。上海汽检拥有先进的整机测试系统,已对目前市场主流的车载毫米波雷达开展了测试验证。
上海汽检同时拥有国内目前唯一的专用交通及车载毫米波雷达的基于点目标和体目标模拟的交通场景动态响应性能评估实验室。通过大型收发天线阵列墙和后端的目标模拟系统实现对常见道路交通参与者和典型交通场景的仿真,评估车载毫米波雷达的动态性能。仿真距离范围可达500米,速度范围可覆盖(-500~500)km/h。上海汽检还创新地建立了常见交通参与者雷达反射截面库,可以根据目标与雷达的相对位置实时提取目标强散射点并合成更为精确的体目标。
上海汽检还具备雷达罩测试能力,提供对雷达罩或保险杠材料的反射率、传输损耗和均匀度的测试,为客户提供全面的毫米波雷达测试评价服务。
审核编辑:汤梓红