传感器的采用导致了如何设计现代车辆的不同理念,从领域架构到较新的分区和中央架构。
电子设备于 1968 年首次出现在汽车中,当时大众汽车在大众 1600 轿车的发动机中安装了电子控制单元 (ECU),以帮助控制燃油喷射。今天,汽车电子无处不在,控制或协助车辆操作和性能的各个方面。据德勤称,电子产品现在占新车总成本的 40% 以上,而 2000 年这一比例仅为 18%。
将计算技术集成到汽车的各个方面已经改变了汽车原始设备制造商处理设计、工程和制造的方式。直到过去十年,汽车电子设备都使用平面架构,其中嵌入式 ECU 以有限的方式一起运行。联网汽车和自动驾驶汽车的进步导致汽车制造商在处理汽车电子设备的通信架构方面存在分歧。
同时,将传感器引入车辆架构进一步加速了对更大计算能力的需求,以处理和分析结果数据。车辆大脑的这些新方面导致了设计现代车辆的不同设计理念,从领域架构到更新的区域和中央架构。
域架构
戴姆勒和宝马等传统汽车制造商普遍偏爱域处理架构,因为他们长期以来一直将 ECU 集成到特定功能,如发动机和变速箱控制、气候控制、防抱死制动和停车辅助。这更像是对旧的扁平 ECU 架构的改进和优化,而不是设计演变或转型。
域架构专注于在通用域控制器或网关下聚合功能相关的 ECU。这在动力总成、底盘、信息娱乐和乘客舒适度领域引入了 ECU 的细分。这种域架构没有针对布线进行优化,因为每个功能域的 ECU 分散在整个车辆中。
区域架构
然而,汽车制造商现在正在向新架构发展,以应对日益复杂的高级驾驶辅助系统 (ADAS)和自动驾驶要求。作为这些转变的证据,戴姆勒在 2020 年宣布,它正在与英伟达共同开发一种新的软件定义计算架构。同样,高通在 2021 年底宣布,它正在与宝马合作开发其下一代 AV 系统。
如前所述,这些传统汽车 OEM 的流行架构之一是新的区域架构。这种方法通过将物理上靠近的 ECU 组合在单个区域控制器下来解决域架构的缺点。其优点是减少了布线和重量,但以增加软件复杂性为代价。这是因为区域控制器必须能够根据功能区分连接到它的 ECU 之间的流量。
以领域为中心的方法向区域架构的演进创建了一个跨车辆的网络系统;电缆从中央服务器向外延伸到网关和传感器。汽车制造商可以轻松地向上和向下扩展区域架构,以支持整个车辆的更多传感器和电子设备。它还允许增加车辆模型模板变体的灵活性。
中央汽车架构
另一方面,Tesla 和 Waymo 等公司往往更喜欢中央处理架构,在这种架构中,制造商将大部分计算能力放在一个中央处理器中。这部分是因为这些汽车制造商无法使用遗留设计或技术债务。在其他情况下,这是因为他们有不同的主要目标。
对于一些汽车制造商来说,尽快实现 ADAS Level-5 自主性至关重要。就 Waymo 而言,值得注意的是,它们并没有实现车辆的所有驾驶功能,例如发动机控制或制动。相反,他们专注于管理用于自动驾驶的传感器。Waymo 将其技术与 Jaguar I-Pace 等现有车辆集成。
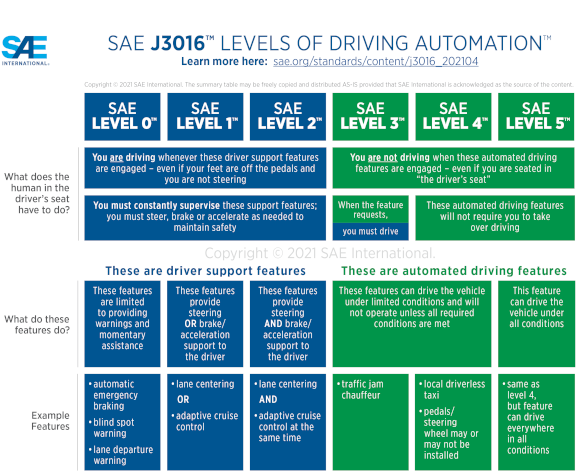
SAE J3016 驾驶自动化级别,其中 5 级被归类为在所有条件下完全自动驾驶,无需驾驶员干预。(来源:SAE)
制造商在追求 5 级自治时利用的集中式方法的一个主要优势是他们可以轻松地分发软件更新。这允许更快速的实验和新功能的引入。将自己视为技术公司和汽车公司的制造商发现,在消费者收到车辆后经常添加新功能的能力更类似于客户对消费电子产品的期望。
此外,集中式方法可以提高车辆安全性,因为没有那么多复杂的区域网关需要保护。制造商可以更轻松地分发无线更新以修补任何安全风险。
另一方面,让一个集中式单元处理大部分处理会带来一些额外的挑战,其中一个是单点故障。鉴于选择集中式架构的公司也在利用额外的传感器来实现车辆自主性,因此车辆还必须快速移动和处理大量数据而不会出错。这对车辆的软件增加了过高的处理性能要求。
CPU 的任何问题通常都是灾难性的,并且需要制造商实施冗余以限制影响中央单元的问题的可能性。
最后的想法
虽然这三种架构都是从不同汽车制造商的特定经验和需求演变而来的,但许多关注该市场的分析师认为集中式架构是汽车架构的最先进演进。这些观察家认为,当行业最终过渡到完整的自动驾驶汽车时,集中式架构可能会占据主导地位。
尽管时间仍然不确定,但我们很可能在短期内看到汽车架构的持续快速创新。
——Thierry Kouthon 是 Rambus 的技术产品经理。