现今车灯多半采用固定式设计,无法满足汽车驾驶在不同车速与路况下所需的安全视野照明需求,因此研究单位开发出结合亮度、速度和距离等感测器,以及马达控制和LED光源模组所打造的可调式车灯控制系统,期进一步提升行车安全。
目前大众经常使用的车灯,多数没有自动亮度调整与切换功能,因此本文提出结合光源调整机构与自动控制概念的车灯光源系统。
此系统係用数颗单晶片组成分散式控制系统,其控制晶片分别检测行车安全距离与自动调整行车光源投影,藉由亮度感测器检测周围环境光源亮度值。当周围亮度足够,控制系统将会调整马达使发光二极体(LED)发光源至透镜焦点形成高亮度的投影;当周围亮度不足,马达反向调整使LED发光源和透镜距离缩小,投射出的LED光束角度呈较宽广的投射面积,有效让夜间使用交通具的驾驶快速掌握行驶路况。此外,本系统后方还设置距离检测器,可以提醒驾驶后方的车距,以提升夜间驾驶安全。
LED将成未来主要道路照明设备
汽机车、电动车或自行车已是现在生活机动性能较高的交通工具,此种工具容易因警示不良发生交通意外事故。在部分先进的国家倡导昼夜都必须要开启车灯,其目的是为提醒其他用路人的注意,确保在道路安全行驶。目前,学界已提出不少可提升行车安全之车用照明系统,以下逐一列点叙述。
.车大灯自动感应点灯系统
该系统利用光感测器与温湿度感测器判定昼夜、下雨或起雾,自动开启车大灯功能。一般道路交通工具使用的大灯多数为利用继电器控制反光片调整车灯光源远近,此种固定方式容易因灯座装置不当,无法确实的照射路面,光源整体投射角度偏高使对向来车产生眩光影响交通安全。
.主动式头灯控制系统
该系统包含自动转向与水平调整,其自行设计灯座以编码器(Encoder)侦测方向盘转角、微动开关及步进马达达到头灯自动转向控制,该研究透过感测器设备与马达驱动,建立主动式头灯控制系统。
.适路性汽车头灯转向系统
为让驾驶者能事先看清楚前方的道路情况,该研究设计使用车头旋转再推算出头灯所应投射的角度,而水平调整使用超音波感测器侦测前后路高,以达到头灯自动水平调整的功能。
近年来车灯除了功能性、实用性之外,美观、造型亦成为产品设计之需求,车灯产业也显示了此种现象。由于功率型发光二极体生产製造技术进步、发光强度提升,且因为其具备体积小、重量轻、省电、寿命长、发热度低、反应速度快及抗震性能好等优点而声势看涨。
LED照明未来将会是道路交通的主要照明设备,其常见的照明方式多数为锁紧固定于车头或车架,且不具有自动调整光源的明亮度与远近灯切换功能,此种固定方式容易因使用者装置不当而影响其他道路使用者,且在有明亮的路灯下照明时,LED所投射的光源因无法自动调整明亮度与灯光远近的切换,导致LED光源容易被路灯的光亮掩盖,让行驶中的车辆无法明确掌握自行车的行车方向。若在高速行驶下的车辆没有远近灯之切换功能,车辆驾驶对远方的路况亦不能清楚了解。由此可证实切换照明设备对于夜间车辆驾驶是不可或缺的设备之一。
车灯光源系统简介
由于车辆驾驶在交通道路上行驶速度不一,所需要的安全视野也会跟着改变,为提升驾驶行驶的安全性。本文提出一项分散式控制系统,每颗晶片仅做出输入讯号的相对应结果(图1),以减少运算时间。本系统分别使用亮度感测器、速度感测器、距离感测器。此系统可随着车辆的移动与四周环境光亮度的改变,远近灯切换可藉由伺服马达角度精密变换,达到自动多段的角度调整车灯光源倾斜角度和马达带动螺桿调整透镜与LED光源的距离,改变LED投射出的光束角度,达到自动切换远近灯与光照的明亮度调整。
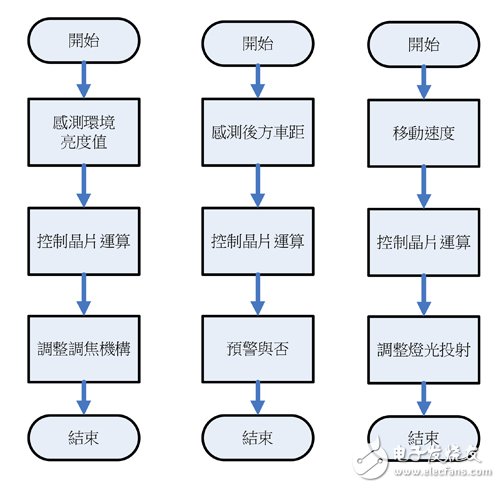
图1 分散式控制系统设计架构图
本控制系统以多块模组组合而成,分别有晶片控制模组、环境亮度光源感测模组、马达控制电路模组与车速速度感测器模组,并以C语言程式编撰系统。
主控制系统设计
本系统利用数个Holtek HT66F50控制晶片(图2)搭配自製设计硬体电路,每组硬体电路皆有专属的功能,以减少系统分散运算时间。其中控制晶片将与各感测模组输出的状态连接,转换成数位讯号,再进行比较、计时、计数等功能推算出车辆行驶的变化,做出相对应的安全预警功能。
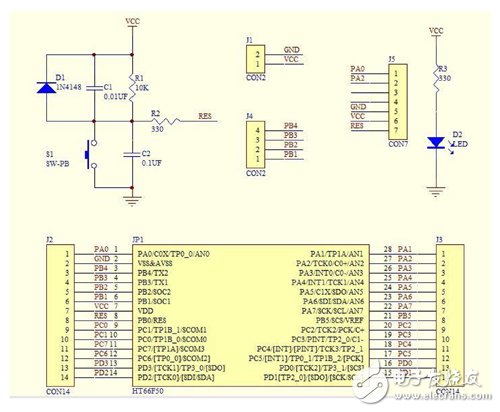
图2 控制芯片硬件电路