开关电源的小信号模型和环路原理及设计
摘要:建立了Buck电路在连续电流模式下的小信号数学模型,并根据稳定性原则分析了电压模式和电流模式控制下的环路设计问题。
本文以此为基础进行分析。采用其他拓扑的开关电源分析方法类似。
设计一个具有良好动态和静态性能的开关电源时,控制环路的设计是很重要的一个部分。而环路的设计与主电路的拓扑和参数有极大关系。为了进行稳定性分析,有必要建立开关电源完整的小信号数学模型。在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。开关电源一般采用Buck电路,工作在定频PWM控制方式。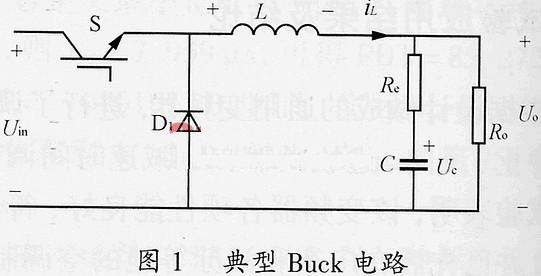
1 Buck电路电感电流连续时的小信号模型
图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。Re为滤波电容C的等效串联电阻,Ro为负载电阻。各状态变量的正方向定义如图1中所示。
S导通时,对电感列状态方程有
L(dil/dt)=Uin-Uo (1)
S断开,D1续流导通时,状态方程变为
L(dil/dt)=-Uo (2)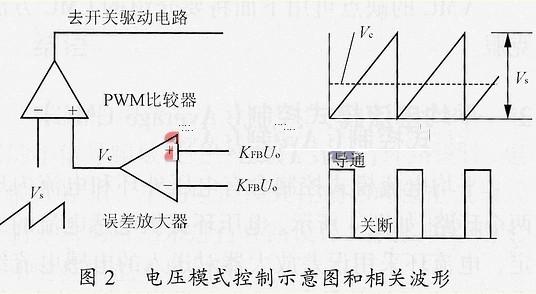
占空比为D时,一个开关周期过程中,式(1)及式(2)分别持续了DTs和(1-D)Ts的时间(Ts为开关周期),因此,一个周期内电感的平均状态方程为
L(dil/dt)=D(Uin-Uo)+(1-D)(-Uo)=DUin-Uo (3)
稳态时,=0,则DUin=Uo。这说明稳态时输出电压是一个常数,其大小与占空比D和输入电压Uin成正比。
由于电路各状态变量总是围绕稳态值波动,因此,由式(3)得
L[d(il+il')/dt]=(D+d)(Uin+Uin')-(Uo+Uo') (4)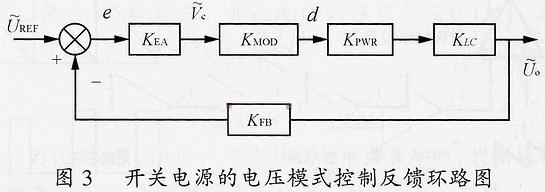
式(4)由式(3)的稳态值加小信号波动值形成。上标为波浪符的量为波动量,d为D的波动量。式(4)减式(3)并略去了两个波动量的乘积项得
L(dil'/dt)=DUin'+dUin-Uo' (5)
由图1,又有
iL=C(duc/dt)+Uo/R0 (6)
Uo=Uc+ReC(duc/dt) (7)
式(6)及式(7)不论电路工作在哪种状态均成立。由式(6)及式(7)可得
iL+ReC(dil/dt)=1/Ro(Uo+CRo(duo/dt)) (8)
式(8)的推导中假设Re<<Ro。由于稳态时dil/dt=0,dUo/dt=0,由式(8)得稳态方程为iL=Uo/Ro。这说明稳态时电感电流平均值全部流过负载。对式(8)中各变量附加小信号波动量得
式(9)减式(8)得
iL+ReC(dil/dt)=1/Ro(Uo+CRo(dUo/dt)) (10)
将式(10)进行拉氏变换得
iL(s)=(Uo(s)/Ro)·[(1+sCRo)/(1+sCRe)] (11)
(s)=(11)一般认为在开关频率的频带范围内输入电压是恒定的,即可假设=0并将其代入式(5),将式(5)进行拉氏变换得
sLiL'(s)=d(s)Uin-Uo'(s) (12)
由式(11),式(12)得
Uo'(s)/d(s)=Uin[(1+sCRe)/(s2LC+s(ReC+L/Ro)+1] (13)
iL'(s)/d(s)=[(1+sCRo)/s2LC+s(ReC+L/Ro)+1]·Uin/Ro (14)
式(13),式(14)便为Buck电路在电感电流连续时的控制-输出小信号传递函数。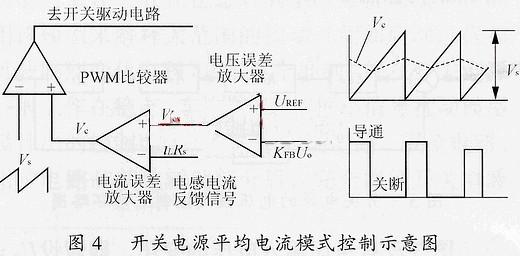
2 电压模式控制(VMC)
电压模式控制方法仅采用单电压环进行校正,比较简单,容易实现,可以满足大多数情况下的性能要求,如图2所示。
图2中,当电压误差放大器(E/A)增益较低、带宽很窄时,Vc波形近似直流电平,并有
D=Vc/Vs (15)
d=Vc'/Vs (16)
式(16)为式(15)的小信号波动方程。整个电路的环路结构如图3所示。图3没有考虑输入电压的变化,即假设Uin=0。图3中,(一般为0)及分别为电压给定与电压输出的小信号波动;KFB=UREF/Uo,为反馈系数;误差e为输出采样值偏离稳态点的波动值,经电压误差放大器KEA放大后,得;KMOD为脉冲宽度调制器增益,KMOD=d/=1/Vs;KPWR为主电路增益,KPWR=/d=Uin;KLC为输出滤波器传递函数,KLC=(1+sCRe)/[S2LC+s(ReC+L/Ro)+1]。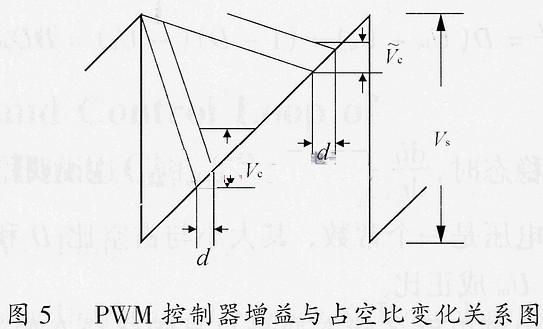
在已知环路其他部分的传递函数表达式后,即可设计电压误差放大器了。由于KLC提供了一个零点和两个谐振极点,因此,一般将E/A设计成PI调节器即可,KEA=KP(1+ωz/s)。其中ωz用于消除稳态误差,一般取为KLC零极点的1/10以下;KP用于使剪切频率处的开环增益以-20dB/十倍频穿越0dB线,相角裕量略小于90°。
VMC方法有以下缺点:
1)没有可预测输入电压影响的电压前馈机制,对瞬变的输入电压响应较慢,需要很高的环路增益;
2)对由L和C产生的二阶极点(产生180°的相移)没有构成补偿,动态响应较慢。
VMC的缺点可用下面将要介绍的CMC方法克服。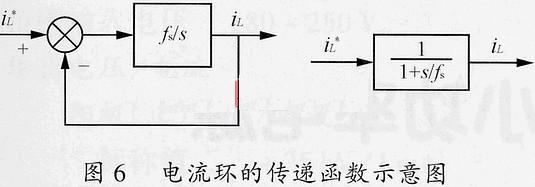
3 平均电流模式控制(AverageCMC)
平均电流模式控制含有电压外环和电流内环两个环路,如图4所示。电压环提供电感电流的给定,电流环采用误差放大器对送入的电感电流给定(Vcv)和反馈信号(iLRs)之差进行比较、放大,得到的误差放大器输出Vc再和三角波Vs进行比较,最后即得控制占空比的开关信号。图4中Rs为采样电阻。对于一个设计良好的电流误差放大器,Vc不会是一个直流量,当开关导通时,电感电流上升,会导致Vc下降;开关关断,电感电流下降时,会导致Vc上升。电流环的设计原则是,不能使Vc上升斜率超过三角波的上升斜率,两者斜率相等时就是最优。原因是:如果Vc上升斜率超过三角波的上升斜率,会导致Vc峰值超过Vs的峰值,在下个周波时Vc和Vs就可能不会相交,造成次谐波振荡。
采用斜坡匹配的方法进行最优设计后,PWM控制器的增益会随占空比D的变化而变,如图5所示。
当D很大时,较小的Vc会引起D较大的改变,而D较小时,即使Vc变化很大,D的改变也不大,即增益下降。所以有
d=DV'/Vs (17)
不妨设电压环带宽远低于电流环,则在分析电流环时Vcv为常数。当Vc的上升斜率等于三角波斜率时,在开关频率fs处,电流误差放大器的增益GCA为
GCA[d(iLRs)/dt]=GCA(Vo/L)Rs=Vsfs (18)
GCA=Vc'/(iL'Rs)=VsfsL/(UoRs) (19)
高频下,将式(14)分子中的“1”和分母中的低阶项忽略,并化简,得
iL'(s)=[d(s)Uin]/sL (20)
由式(17)及式(20)有
(iL'Rs)/Vc'=[Rsd(s)Uin/(sL)]/[d(s)Vs/D]=(RsUinD)/(sLVs) (21)
将式(19)与式(21)相乘,得整个电流环的开环传递函数为
(RsUinD/sLVs)·(VsfsL)/(UoRs)=fs/s (22)
图7
将s=2πfc代入上式,并令上式等于1时,可得环路的剪切频率fc=fs/(2π)。因此,可将电流环等效为延时时间常数为一个开关周期的纯惯性环节,如图6所示。显然,当电流误差放大器的增益GCA小于最优值时,电流响应的延时将会更长。
GCA中一般要在fs处或更高频处形成一个高频极点,以使fs以后的电流环开环增益以-40dB/dec的斜率下降,这样虽然使相角裕量稍变小,但可以消除电流反馈波形上的高频毛刺的影响,提高电流环的抗干扰能力。低频下一般要加一个零点,使电流环开环增益变大,减小稳态误差。
整个环路的结构如图7所示。其中KEA,KFB定义如前。可见相对VMC而言(参见图3),平均CMC消除了原来由滤波电感引起的极点(新增极点fs很大,对电压环影响很小),将环路校正成了一阶系统,电压环增益可以保持恒定,不随输入电压Vin而变,外环设计变得更加容易。
4 峰值电流模式控制(PeakCMC)
平均CMC由于要采样滤波电感的电流,有时显得不太方便,因此,实践中经常采用一种变通的电流模式控制方法,即峰值CMC,如图8所示。电压外环输出控制量(Vc)和由电感电流上升沿形成的斜坡波形(Vs)通过电压比较器进行比较后,直接得到开关管的关断信号(开通信号由时钟自动给出),因此,电压环的输出控制量是电感电流的峰值给定量,由电感电流峰值控制占空比。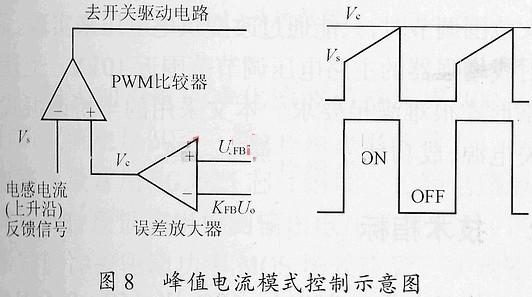
峰值CMC控制的是电感电流的峰值,而不是电感电流(经滤波后即负载电流),而峰值电流和平均电流之间存在误差,因此,峰值CMC性能不如平均CMC。一般满载时电感电流在导通期间的电流增量设计为额定电流的10%左右,因此,最好情况下峰值电感电流和平均值之间的误差也有5%,负载越轻误差越大,特别是进入不连续电流(DCM)工作区后误差将超过100%,系统有时可能会出现振荡现象。在剪切频率fc以下,由图6可知平均CMC的电流环开环增益可升到很高(可以>1000),电流可完全得到控制,但峰值CMC的电流环开环增益只能保持在10以内不变(峰值电流和平均值之间的误差引起),因此,峰值CMC更适用于满载场合。
峰值CMC的缺点还包括对噪音敏感,需要进行斜坡补偿解决次谐波振荡等问题。但由于峰值CMC存在逐周波限流等特有的优点,且容易通过脉冲电流互感器等简单办法复现电感电流峰值,因此,它在Buck电路中仍然得到了广泛应用。
5 结语
采用平均状态方程的方法可以得到Buck电路的小信号频域模型,并可依此进行环路设计。电压模式控制、平均电流模式控制和峰值电流模式控制方法均可用来进行环路设计,各有其优缺点,适用的范围也不尽相同。