本文阐述的是一种运用多种传感器的航迹推算定位技术。该种定位方式适用于已知航线的行走,能够准确的从出发地快速行进到目的地,具有良好的嵌套性,可以成为某些大型定位系统的基本单元,同时具有抗干扰能力强、维护方便的特点。
1 系统总体设计
1.1 系统的总体结构
系统采用航迹推算原理对移动式机器人进行定位,航迹推算即利用外部传感器的数据实现机器人实时位置和运动方向的估计,短期定位精度高。航迹推算技术的关键是需测量出机器人单位时间运动的距离以及这段时间内机器人航向的变化。在本设计中,主要采用编码盘和陀螺仪进行航迹推算来实现定位,系统采用模块化设计,由驱动模块、传感器和反馈模块以及控制模块等组成,原理框图如图1所示。
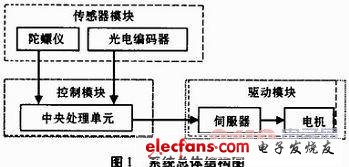
为提高抗干扰能力,系统各模块之间相互独立使用ISP串行通讯进行数据通信,每个模块都与控制系统构成一个闭环单元,控制系统通过算法整合,从而降低了各个单元之间的干扰和误差的累积。控制系统发出路线的整体行走方案,再由各个闭环单元检测是否按原定计划实施,当出现错误和误差时,系统通过采集的数据即刻做出实时调整,实现快速、准确定位。
1.2 系统的数学模型
系统的数学模型可以看成是一个平面坐标定位,在平面内任何一个点的速度可以表示为线速度V和角速度V,其坐标为(x,y)。当一个物体在平面内从一点移动到另一点时,只要画出运动轨迹,就可以计算出在该轨迹上任一点的速度和坐标,以进行定位。假设某一运动轨迹方程已知,则需要按其轨迹进行运动定位,其数学模型如图2所示。
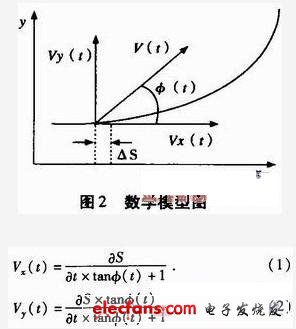
式中,Vx(t)和Vy(t)分别表示x轴和y轴在时间t时的速度,S表示t到t+1时刻的行走路径,φ(t)表示t时刻x轴速度与速度的夹角。
2 系统电路设计
2.1 伺服器电路
伺服器是一种电机驱动器,与普通电机驱动器不同,该驱动器可以与电机连接形成闭环控制单元。伺服器通过实时检测安装在电机上的高分辨率光电编码器的信号计算出电机转速和转角,通过与目标转速和转角进行比较来实时调整电机运动状态。
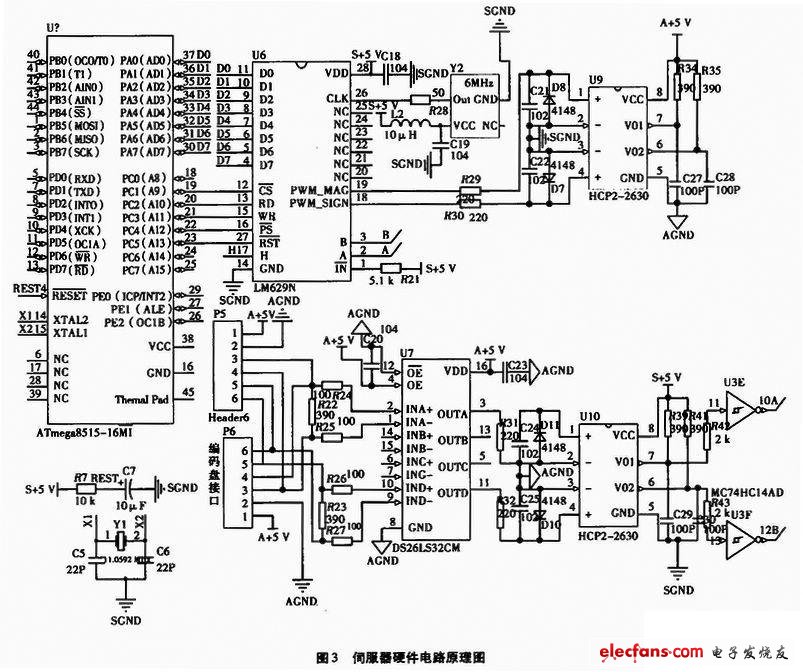
如图3所示为伺服器系统硬件电路的信号处理单元。该电路包括了信号整合和信号运算,其中DS26LS32CM实现编码盘信号的整合,即把4路PWM信号整合成2路PWM信号。由于编码盘信号是由A、B两路相位差为90°的PWM组成,通过对DS26LS32CM逻辑使能口的电平控制,可实现输出端在A、B信号超前或滞后90°时输出高电平或低电平,以此判断出电机正反转状态。LM629为PID信号算法芯片,通过对编码盘信号运算和DS26LS32CM输出信号状态分析,芯片可发出信号使电机一直保持在编码盘的某一个栅格处,让电机急停锁死或准确运动所需要的栅格数,实现对机器人移动的准确控制。HCP-2602为高速光耦芯片,其目的是减少控制端与电机之间的信号干扰。