室内定位系统(Indoor PosiTIoning System,IPS)是普适计算中的重要内容。随着智能终端的普及、移动互联网时代的来临,复杂室内环境下的定位与导航的需求日益增大,同时,IPS在公共安全、移动电子商务等领域都有着广泛的应用。目前,IPS采用的定位技术主要包括RFID、Bluetooth、WiFi、UWB、ZigBee、光学、超声波、红外线、地磁场等。采用单一定位技术的室内定位系统都存在一定的缺陷,如负担性强、扩展性和鲁棒性差、定位精度低、响应时间长等。因此,多种定位技术融合是IPS的一个发展方向。
压力传感触控技术(Force Based Touch Sereen Technology)zTouch来自于美国F-Origin公司。该技术的原理是在刚性面板的四周角落处设置多个压力传感器,通过传感器感知用户在面板上触摸或做手势产生的垂直于面板的压力,根据各点传感器受力不同进行定位。该技术具有环境鲁棒性好、持久性强、无负担性以及三维信息感知、定位精度高等优点,应用于IPS可弥补其他定位技术的不足。目前,国外有多家机构正在研究基于该技术的定位系统,如英国兰卡斯特大学的Weight Lab、英国谢菲尔德哈勒姆大学和德国亚琛工业大学的Smart Floor等。
本文基于压力传感触控技术设计了一种智能地板,并采用该地板构建了一小型定位系统。系统采用16个压力传感器和4块地板构建定位平台,实现对平台上运动小车的定位和路径显示,并能通过LabVIEW软件和Android终端查看小车位置信息。
1 定位原理
压力传感触控定位技术的基本单元由1块刚性面板和4个压力传感器组成,压力传感器分布于刚性面板的四角处,形成一四支点结构。四支点定位模型如图1所示。
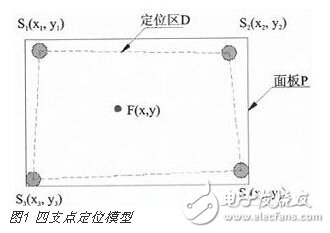
在图1所示的模型中,Si(i=1,2,3,4)表示第i个压力传感器。在P平面的二维坐标系中,记Si与P平面的接触点(或接触面的中心点)的坐标为(xi,yi),4个接触点构成的矩形区域(虚线框内)称为定位区D。在D中任一点(x,y)处施加一垂直于P平面的力F,令Fi表示Si受到的F的分压力,根据四支点平面物体重心位置计算公式,式(1)~(3)成立。
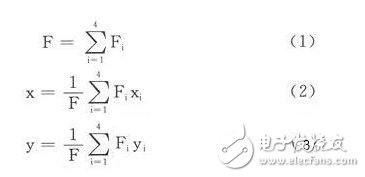
根据式(1)~(3),可计算出力F的位置,从而实现定位。
2 系统结构设计
2.1 系统设计
根据本研究的实验条件,构建了一个针对小车的定位演示系统。系统由定位平台、定位对象(小车)、数据采集卡、PC机、Android监视终端组成。当定位对象在定位平台上静止或运动时,通过分析传感器的数据计算出其在物理空间中的绝对位置坐标(X,Y),该位置属性经过映射,反映在上位机位置管理服务器(LabVIEW软件)的虚拟地图中。位置管理服务器可以构建虚拟场景,并可为移动终端提供位置查询和导航的服务。定位系统构成如图2所示。
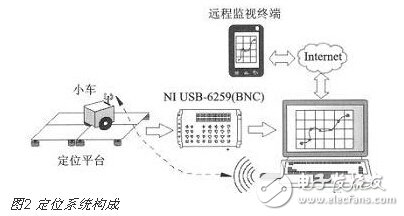
本系统采用USB-6259(BNC)采集定位平台传感器的数据。USB-6259(BNC)是美国NI公司生产的一款高速、多功能M系列的数据采集卡,提供有16路模拟输入通道,其最高采样率为1.25 Ms/s,采样精度为16位,满足系统要求。
定位系统可分为3个模块:
①定位显示模块。该模块实现在PC机端的LabVIEW平台下,实时显示小车在定位平台的绝对位置及运动路径。
②运动控制模块。该模块实现通过LabVIEW程序控制小车的运动,通过蓝牙传送控制指令,达到非接触移动小车的目的,同时防止接触方式产生的侧向力对定位精度的影响。
③远程监视模块。该模块实现通过Android手机远程监视小车的位置,PC机通过互联网向远程终端广播小车的位置信息。
2.2 定位平台的设置
定位平台由16个传感器和4块玻璃板组成,总面积为70&TImes;70 cm2,分为4个单元。传感器采用轮辐式压力传感器(型号为BK-4)。传感器自身集成有电桥,对外有4条引线,分别为电源Vbg、GND、信号+和信号-。由于传感器输出的信号微弱(μV~mV级),因此需要对信号进行放大。本系统采用的放大器为AD623。
为确保定位的准确,定位平台需要调平。当定位平台不平时,即当传感器高度不一致,在图1所示的四支点定位模型中可能会有1或2个支点处于不受力的悬空状态,即“虚腿”现象。“虚腿”现象将改变四支点平台力的分布,从而不能应用四支点公式求重心位置。周祖濂通过数学模型证明了在四支点结构中的四个支点能够同时受力,即“虚腿”现象可以通过调平来避免。
四支点平台的简单调平通常采用向最高支撑靠拢的方法,即通过垫片调节4个支点中高度较低的3个,使其与最高支点高度一致从而调平台面。本系统通过在传感器下垫纸片的方法调平定位平台。
3 系统软件设计
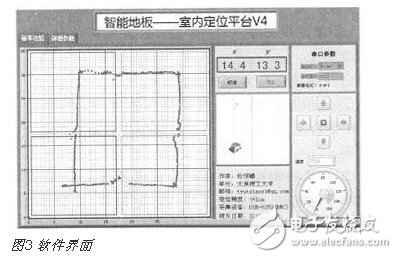
本系统上位机开发平台采用NI公司推出的LabVIEW 2013。设计的软件界面如图3所示。
3.1 定位显示模块
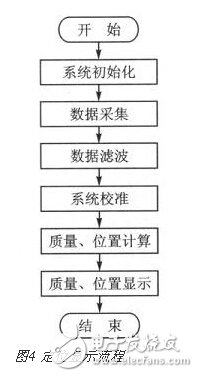
定位显示模块的输入为16个压力传感器的数据,经过滤波和计算,输出为定位平台上物体重心的位置。位置显示方式包括文本坐标和二维图片,路径显示方式为XY图。定位显示流程如图4所示。
3.2 运动控制模块
运动控制模块是通过在PC机和小车间建立蓝牙通信实现的。不具备蓝牙功能的PC机可通过蓝牙适配器和BlueSoleil软件实现蓝牙功能,小车端通过UART接口连接一蓝牙透传模块,此时,PC机端和小车端建立了虚拟串口连接,LabVIEW端通过VISA串口通信编程实现向小车发送运动指令。本模块可完成对小车的速度控制以及前进、后退、左转、右转、停止5种运动状态控制。
3.3 远程监视模块
远程监视模块中,PC机为位置管理服务器,Android终端为客户机,网络架构采用分布式Publisher-Subscriber模式,PC机为所有注册的Android终端提供位置查询服务。
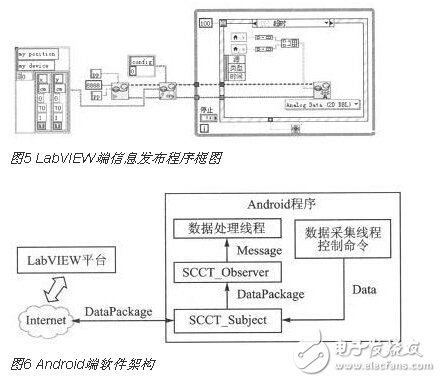
远程监视模块采用了跨平台网络通信插件SCCT。SCCT(Smart Phone&Cross-Plat-form CommunicaTIon Toolkit,智能手机跨平台通信包)是由T4SM(Tools for Smart Minds SoftwareSoluTIons)公司研发的、支持多种平台和编程语言的开发包,用于多种平台与LabVIEW平台之间进行数据通信。SCCT支持的操作系统包括Windows、Linux、iOS、Android、Phone7,支持的编程语言包括LabVIEW、Java、C、Object C、.NET和Javascript(HTML5)。本系统中,LabVIEW端采用SCCTPublisher Library提供的VI实现验证请求连接的订阅者身份、检查连接状态、广播数据至所有活动状态的订阅者以及接收订阅者请求的功能,Android端采用SCCT Subscriber Library提供的API实现发送请求至发布者、接收数据并提交至界面进行显示等功能。
LabVIEW端信息发布程序框图如图5所示。Android端的软件架构如图6所示。
4 系统测试与结果分析
Android手机端远程监视界面如图7所示。

经测试,本系统实现了对小车的定位显示、运动控制和远程监视的功能。
在定位精度的测试中,在平台上画有位置参照网格,网格边长为1 cm。在定位平台上随机选取10个测试点,在每个点处施加压力,测量6次,记录软件计算出的坐标,并与实际网格坐标进行比较。在数据分析过程中,定义以下概念:
①偏差Xp、Yp。假设在物理平台上测试点的网格坐标取值范围为X∈[a,b],Y∈[c,d](a、b、c、d为非负整数,b-a=d-c=1,单位为cm)通过软件求得的坐标为(x,y),定义偏差Xp、Yp:
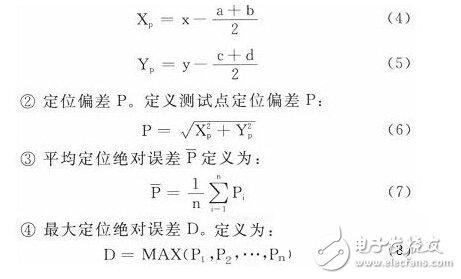
式中,MAX()为最大值;Pi为第i个测试点的定位偏差(cm)。
经测试,P=0.6 cm,D=1.8 cm。因此,单块智能地板的定位绝对误差在2 cm内。在智能地板特性不变的前提下,由多块智能地板拼成的更大面积定位空间的定位绝对误差也在2 cm内。
结语
本文设计了一种智能地板,并基于该地板构建了一个定位系统,实现了通过PC机LabVIEW软件和Android手机软件查看智能地板上物体位置和运动路径信息的功能。本定位系统最大定位绝对误差在2 cm内,且具有环境鲁棒性好、无负担性等优点,与其他定位技术结合,可弥补现有室内定位系统的不足。此外,本智能地板还可用于重点区域安防、隐私保护下的监控等场合。