随着物联网(IoT)的发展,诸如“雾计算”的去集中化分布式智能概念正大行其道,以满足对更低延时、更高安全性、更低功耗和更高可靠性的要求。这种向更加分布式的数据处理和存储方法发展的趋势,需要有更加智能的传感器和全新的无线传感器网络架构。
虽然雾计算这个术语比较新,但其基本前提是经典的去集中化,即一些处理功能和存储功能在本地执行,要比将数据从传感器一路发送到云端,然后再返回执行器的性能更好。这样做可以缩短延时,并减少需要来回传送的数据量。缩短延时有助于改善消费类应用的用户体验,而在工业应用中,它还可以改善关键系统功能的响应时间,节省费用甚至拯救生命。
这种分布式方法通过减少需要从网络边缘传送到云端的数据量提高了安全性,还降低了功耗和数据网络负载,从而提高了总体服务质量(QoS)。雾计算还能促进本地资源池的建立,以充分利用给定区域的可用资源,并将物联网的基础功能之一——数据分析加进来。
雾计算在充分发挥其潜力所需的网络架构和协议方面存在着细微差别,以致于成立了诸如开放雾联盟的组织来定义怎样才能获得最佳的实现(题图:开放雾联盟正在寻求确定最佳的架构和编程方法,以确保从传感器到云端以及回传路径中的功能和智能的最优分布(来源:开放雾联盟))。
目前为止,开放雾联盟成员包括思科、英特尔、ARM、戴尔、微软、东芝、RTI和普林斯顿大学。开放雾联盟迫切希望与其它组织协同发展,包括工业互联网联盟(IIC)、移动边缘计算(ETSI-MEC)、开放互连基金(OCF)以及OpenNFV。开放雾联盟已经发布了一份白皮书,用于指导大家当前的思维过程(必须注册才能下载)。
用于雾计算的可靠传感器
随着雾计算的兴起,设计师必须估算出系统的每个节点应该有多少智能才能获得最优性能。这意味着传感器需要开始变得更加智能,需要具有一定程度的内置处理、存储和通信能力。虽然这个要求已经提出来一段时间了,但似乎到达了一个临界点,即从传感器提供商角度看正在成为必要条件,虽然通常存在着成本、空间、功耗和尺寸方面的折衷。
虽然在小尺寸和功能集成方面,MEMS传感器一直是设计师的理想选择,但在后续集成过程中,为了满足雾计算提出的智能传感器需求,需要考虑可靠性方面的问题。到目前为止,MEMS传感器上数字功能的集成已经实现了双向通信、自检和补偿算法的实现(图2)。
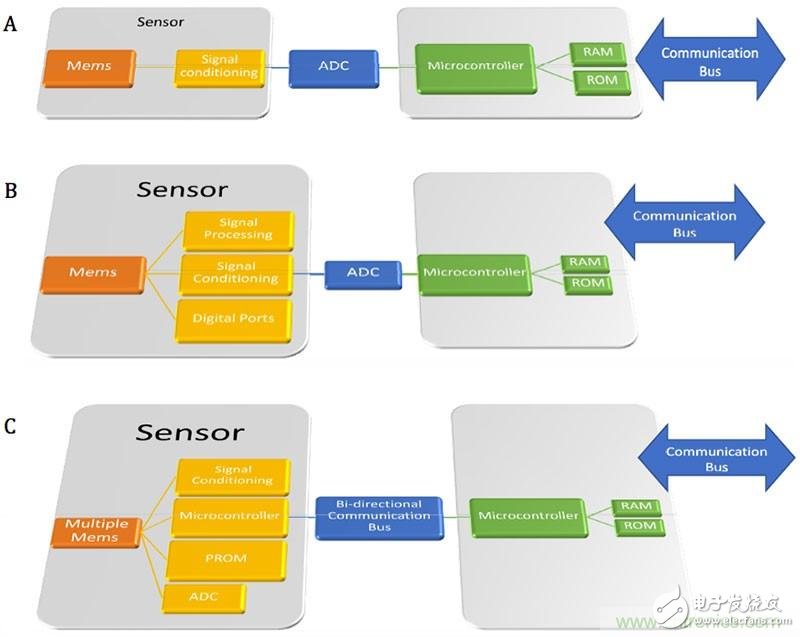
图2:从基本的模拟信号调节(A)一直到板载MCU(B)、本地内存和ADC(C)提高数字集成程度,有助于MEMS传感器更好地实现自检和主动补偿例程,但实时的可靠性监视仍然很难。
如果MEMS传感器对于监视电能分配、医疗系统功能以及工业系统状态和过程来说,是长时间受信任的,那么这些功能就很重要了。这种MEMS传感器应用如此重要,以致于位于墨西哥哈拉帕市的韦拉克鲁斯大学研究人员一直在调查其它的可靠性保证方法,这些方法通过监视常见故障率进行可靠性预测。正如研究人员指出的那样,这些方法都缺少实际能力,来预测从北极圈到热带的各种工作环境中的可靠性。
当我们用无处不在的智能传感器义无反顾地实现雾计算时,确保来自这些传感器的数据的可靠性变得越来越重要。与此同时,雾计算原理的实际运用意味着通信基础设施正在落实到位,以确保节点间能够更好地通信。这两个因素使得韦拉克鲁斯大学开发实时传感器故障分析方法变得令人更加感兴趣,因为这些方法适用于新的检测和组网范例。
在建议的设计中,研究小组使用了一个低功耗的8位PIC18F4550 MCU、一个10位的模数转换器(ADC)、一个TI INA333仪器放大器和一个HC-05蓝牙模块来监视传感器健康数据(平均无故障时间(MTBF)),并将数据传送给智能手机(图3)。故障可以像通信链路丢失这么简单。
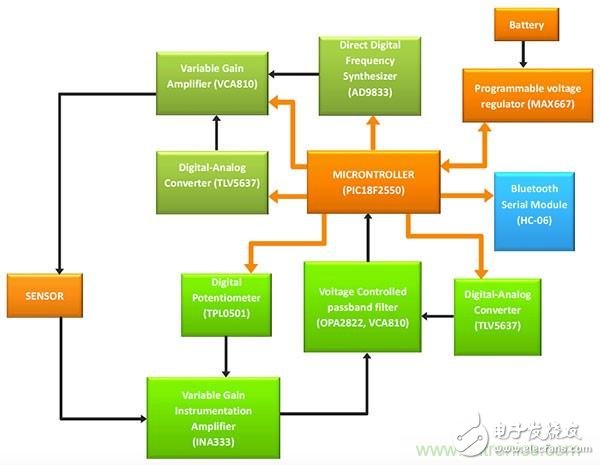
图3:建议的实时传感器监视方法消除了传感器可靠性预测的异常行为,因而使得关键的物联网MEMS传感器数据变得在很长时间内都更为可靠。
这里的关键是,所有传感器的MTBF都存储在本地的非易失性存储器中,并且随着时间的推移,其可靠性数据会被不断地重新计算和更新。
向传感器中增加更多的智能是好事,但随着我们越来越依赖这些传感器,更好地理解传感器(和系统)的状态,将可以确保我们用于雾计算的数据本身变得更为可靠。