发动机温度场的测试是指对壁面温度与高温燃气涡轮发动机燃烧室的热端部件的测量。发动机热端部件的使用寿命的长短与热端部件温度场的分布是否均匀有密切关系,因此必须对发动机温度场进行准确地测试。
1 研究现状
目前,国内发动机生产和修理企业测试发动机某些零部件的温度场主要有直接接触法和人工判读法。直接接触法是用热电偶来直接测试发动机的零部件温度,如图1(a)所示。但用该方法测量误差大,且只能对某些点的温度进行测量,不能实现对整个温度场的测量。人工判读法是指发动机生产和修理企业利用示温漆的颜色温度特性来间接地人工判读发动机零部件的温度,如图1(b)所示。目前大多数发动机生产厂家采用示温漆来间接地测量发动机部件的温度场,示温漆是一种温度传感器,它能在不同的温度范围内呈现出不同的颜色,将其涂在发动机测试件表面,根据被测件表面示温漆的颜色来判断其温度。
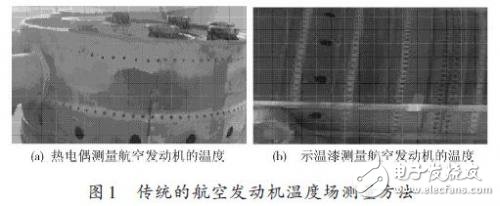
用示温漆来测量发动机热端部件的温度场具有测量面积大、测温范围广、使用方便、操作简单、不破坏物体表面形状等优点,因此能够得到比较广泛的使用,但这种方法易受环境光的影响,存在误差大、效率低等缺点。为了提高发动机温度场的测试精度、测试效率和鲁棒性,本文首次提出了一种基于多传感器图像融合发动机温度场测试系统。
2 系统整体设计
2.1 工作原理
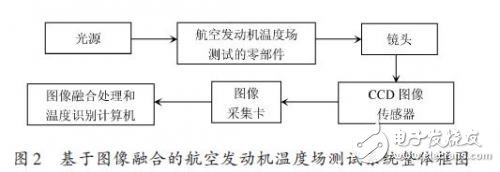
整个发动机温度场测试系统是由光源、发动机温度场测试的零部件、镜头、CCD图像传感器、图像采集卡、图像融合处理和温度识别计算机5 大部分组成。光源的作用就是在昏暗的环境下或是需要单独光线的特殊照射下提供足以实现图像采集的光线;镜头的作用是通过自身的调节保证图像传感器可以采集到大小合适、清晰度高的目标图像;图像传感器是通过CCD或CMOS感光元件将图像转化为信号进行采集;图像采集卡主要是为了把图像传感器获取的目标图像采集并传输到计算机图像处理系统,计算机对采集到的图像进行图像融合、处理和温度识别。整个发动机温度场测试系统整体框图如图2所示。
整个系统的工作工程如下:首先当测试目标接近到CCD 图像传感器视角中心时,图像采集卡分别向CCD图像传感器和照明设备发出启动脉冲启动图像传感器和照明设备工作,CCD图像传感器进行一帧图像的扫描和输出;接着图像采集卡把从CCD 图像传感器采集过来的模拟信号进行A/D转化变成数字信号;图像采集卡将图像信号送到图像处理和温度识别计算机内,进行图像融合以及温度识别等处理,最后计算机对图像处理、分析、目标温度识别的结果进行显示。
2.2 光源
在测试系统过程中,光源选择的目的是为了获得高对比度的目标信息和背景信息的目标图像,以突出感兴趣的目标特征、抑制不感兴趣的背景特征,从而大大地减少目标图像处理的难度,提高系统的鲁棒性和测量精度,因此光源的选择应该遵循对比度大、亮度适中、光源均匀、鲁棒性高等原则,同时还有兼顾使用寿命、温度影响以及价格成本、设计难度等因素。常用的光源有LED灯、卤素灯、荧光灯和激光光源等,这里选择LED灯,因为LED灯具有稳定、节能且亮度可调、使用寿命长等优点。
2.3 图像传感器
图像传感器是测试系统获取图像的关键部件,他将测试目标光信号转化为电信号再经过A/D 转换成为数字图像信号之后,就可以在计算机里进行数字图像处理了。目前图像传感器主要有CCD 和CMOS 两种。CCD图像传感器[1]是一种新型的半导体固态图像传感器,它由CCD 电荷耦合器件制成,它具有集成度高、功耗低、结构简单、耐冲击、寿命长、性能稳定、成像质量高等优点,因而被广泛应用。CMOS图像传感器是利用CMOS型光电转换器件制成的,这种传感器价格便宜但成像质量不高。考虑到测试系统对图像质量要求比较高,这里选用了CCD图像传感器。本系统安装多个CCD图像传感器,从不同角度获得测试目标的图像。采用多传感器冗余结构,同时也提高了系统的鲁棒性。
2.4 镜头
镜头是测试系统的重要组件,它把测试目标成像在CCD图像传感器的光敏感面上,其质量的好坏直接关系到发动机部件温度场图像的采集质量,也直接影响到整体系统的性能。本测试系统中,本测试系统中镜头的选取遵循了以下3个原则:
(1)遵循分辨率高;
(2)成像尺寸应不小于CCD图像传感器的靶面尺寸;
(3)根据CCD 图像传感器与被测试目标之间距离来选择镜头的焦距。这里使用多个镜头,每个镜头对准一个CCD图像传感器。
2.5 图像采集卡
图像采集卡是将CCD图像传感器获得的目标模拟图像信号转换成数字图像信号,图像采集卡带有外接的信号接口与CCD 图像传感器相连,图像采集卡装在计算机的一个总线插槽上。工作时,图像采集卡先对CCD图像传感器输出的模拟图像信号进行采集,然后经过A/D转换把模拟图像转换为数字图像存储在存储器里,计算机对采集到的多源图像进行数字图像融合和处理。目前图像采集卡主要有PCI和PXI两种,基于PCI总线的图像采集卡具有工业环境下振动、撞击、温度和湿度极限条件。考虑到发动机工作时高振和高温等,这里选择于PCI总线的图像采集卡。
2.6 图像融合处理计算机
为了减少人工判读误差,在利用示温漆图像进行温度场识别之前,必须进行图像融合及图像处理,图像融合处理计算机就是把从CCD图像传感器获取的目标图像采集存储到计算机存储器里,并对目标图像进行数字融合和温度识别处理,从而得到测试目标温度场分布情况。
3 系统软件设计
基于图像融合的发动机温度场测试系统软件设计流程如图3所示。
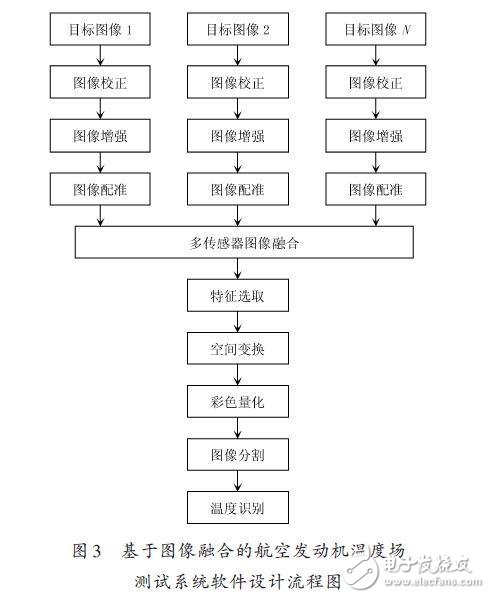
整个软件设计主要包括以下3个部分:图像融合预处理和图像融合、融合图像后处理、测试目标示温漆图像的颜色温度识别。图像融合预处理是指把N个传感器在不同角度获得的N 个目标图像分别进行图像校正,图像增强、图像配准预处理后再进行图像融合。图像融合的目的是为了扩大系统工作范围、提高系统的可靠性和图像空间分辨率、改善图像精度,增强特征显示能力,提供变化测试能力,替代或修补图像数据的缺陷等。
常用的图像融合算法有基于空间的图像融合和基于变换域的图像融合两大类。本课题采用基于变换域图像融合算法中的小波融合算法对目标图像进行融合,该算法具有能够去除特征相关性,提供多尺度信息,对所感兴趣的特征和细节信息进行强化等优点。
基于小波变换算法的图像融合的结果如图4所示,图像C是图像A和图像B融合后的图像,这里小波基系数用sym6、分解层数是3层、低频取平均、高频取窗口系数加权。
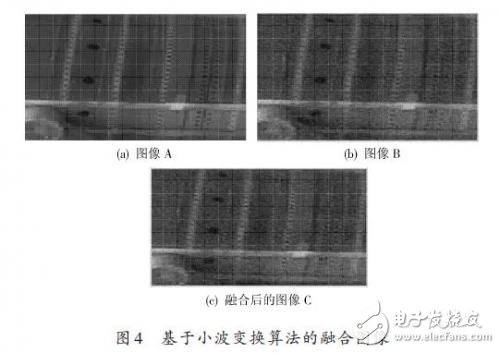
计算出图像融合的3个评价指标:信息熵、空间频率和平均梯度,通过计算结果数值比较,融合后图像的3个指标都有明显地提升,这说明融合后图像质量和清晰度都明显地提高了。
图像融合后进行图像后处理:包括特征选取、空间变换、彩色量化、图像分割。最后根据示温漆的颜色温度特性对目标图像进行温度识别。示温漆颜色图像温度值的判断方法如下:要判断A点的温度值,就要寻找曲线上与A点距离最近的一点B,点A与点B的距离可用欧式距离表示。若AB 为最小距离,则认为B 点所对应的温度值即为A点的温度。
4 结语
该测试系统中,图像融合是图像处理的关键,它直接决定了图像处理后的质量和清晰度。实验证明,该系统明显地提高了发动机温度场的测试效率和测试精度,具有非常好的应用推广价值。