本文提出一种基于数字式MEMS(微电子机械系统)加速度传感器ADXL213的倾角测量装置,该装置采用占空比调制电路获得相应的数字信号。根据对实际运动模型的分析,建立了相应的数学模型。利用整个系统硬件的特点,达到良好的实际测量结果。
物体在运动中的倾角是描述物体运动状态、特征的重要参数,在交通、航天、军事领域中都有着重要的意义,对目标的定位、追踪起到非常重要的作用。所以开发价格适中、精度高,测量范围大的角度测量模块具有很强的实用价值。
本文根据对实际运动的分析,研究建立了相应的数学模型,利用数字式MEMS加速度传感器并配合适当的硬件电路和软件算法实现了一种性价比高,高精度,测量范围大的角度测量模块并通过实际运行,取得良好的效果。
1、对象研究和建模
本文研究的对象是物体运动时,其整体平台的倾斜角,例如普通车辆机车,军用车辆机车和海上装备等,在运动过程中由于路面、坡度等影响会使整个平台架产生一定的倾角,而这些参数对于精确导航、列车行程控制等系统都具有重要的意义。
根据经典力学可以知道,当对象与基准平面有一个角度的夹角时,其运动方向的加速度与重力加速度的比值和没有夹角时其加速度与重力加速度的夹角α是不同的。根据力的分解,重力加速度就会有分量作用在Ax方向,且Ax=gsinα,于是倾斜角α=sin-1(Ax/g)。见图1-(a)所示。但是,当对象在基准面方向上做变加速的运动时,其Ax同样是一个变化值,这样将由于无法区别对象的静态加速度和动态加速度而做出正确的判断。也可以考虑采用图1-(b)中所示方法测量,将Ax设定为始终与运动面垂直的方向,这样Ax=gcosα,则倾斜角α=cos-1(Ax/g)。这个方法在普通的道路坡度只能在Ax方向产生一个很小的加速度变化,而这对于该传感器的精度是很难达到的。
故考虑采用如图1-(c)所示方法进行测量,利用双轴的加速度传感器,其两个夹角之间相差90°,两个角分别为45°和135°角,当车辆静止在平面上时,加速度传感器的两个轴向测得加速度:Ax=Ay=0.707g。
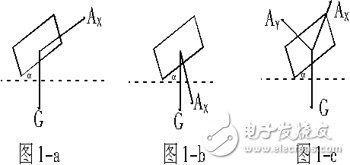
图1测量力学原理图
当车辆在平面上加速时,加速度传感器的两个轴向就会测得两个大小相等,极性相反的加速度变化,而(Ax+Ay)保持不变,例如:车辆向前加速时,Ax增大而Ay减小。
当车辆倾斜时,倾斜角α=cos-1[0.707(Ax+Ay)/g]。但是在实际情况中,由于测量、安装等原因,几乎不可能做到加速度传感器与车辆的径向正好成45°,所以需要在系统初始化时,首先测量出加速度传感器与车辆的径向的夹角β,可根据公式β=arctan(Ay/
Ax)计算得到。
由此可得最后的倾斜角为:α=cos-1[(Axsinβ+Aycosβ)/g]。根据这个数学模型,可以很好的测得角度的变化。所以在实际使用就利用软、硬件根据该模型进行设计从而实现了微小角度的测量。
2、系统设计
根据上面的对象研究和建模分析,并结合实际需求开始进行系统设计。在设计的过程中,根据算法设计选取了相应的硬件,按照硬件的选取经过分析,最后确定所需硬件电路,然后编制了相应的软件完成整个设计。
2.1 硬件设计
设计中使用的是ADXL213芯片,其采用先进的MEMS技术,在同一硅片中刻蚀了一个多晶硅表面微机械传感器,并集成了一套精密的信号处理电路。信号处理电路能将表面微机械传感器产生的模拟信号转换为占空比调制(DCM)数字信号输出。
这种占空比调制信号可以直接使用单片机或计算机进行处理。用单片机进行数据处理时,使用计数器测量方波周期T2以及脉冲的宽度T1。其计算公式:AX=(T1/T2―ZeroBias)/SensiTIvity;ZeroBias=50%,SensiTIvity=30%/g,T2=Rset/125。ADXL213可以测量静态加速度,也可以测量动态加速度,其最大测量带宽为2.5kHz。带宽(W)是由低通滤波器的参数确定的。其满足如下关系式:W=1/2πRFCF。式中:RF为滤波器的电阻值,即集成在芯片内部的电阻;CF为滤波器的电容值。可见,带宽主要由CF确定。在实际设计过程中,根据汽车加速度-时间曲线,选定滤波器的带宽为1Hz,这样做不仅有利于滤除高频干扰,也利于降低系统噪声干扰。由于ADXL213中T2的范围为1~10ms。而DCM输出方波频率应大于模拟带宽10倍以上,再结合单片机晶振等确定T2的周期和Rs的设定值。在以上研究的基础上,设计了系统的硬件电路。而在该系统由于前面所论述的算法关系,所以系统在安装时,需要将车辆预先停置在一个的水平校准面上安装系统。然后系统将按照软件进行工作。
2.2 软件设计
由于前面算法所述,系统硬件电路中,由于所选用芯片的测量方法的缘故,电路板的两条互相垂直的边应与平面成45度角,但实际却很难保证45度角,故首先应测试其实际角度,并将该角度存入寄存器中,在后面的应用中,可以将初始数据做为基准,进行测试以确保角度计算的准确性。初始数据标定在设计中采用自恢复按键脉冲触发单片机的中断调用来实现。在本设计中,按照如图2所示的流程编程实现了车辆在行驶过程中的微小角度的测量以及其他辅助功能的实现。
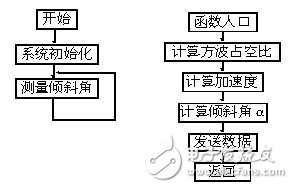
图2计算程序流程图
3、数据与结论
通过以上的硬件和软件设计后,最终实现了整个系统功能,并进行了一系列的实验。根据实际情况,在实际中,采用适当的滤波电容,带宽为5Hz,噪声约为0.43mg,Rs阻值设置为1M,这样结果测得方波周期约为141Hz。占空比精度可到达0.14%。通过实际测量发现,输出波动在1°之内,即小于17mg,通过采样20个数据求平均计算发现输出波动在0.5°以内,小于8.7mg,故完全符合系统设计要求,满足实际需要,能够很好的实现设计初的目的和要求。图3为实际上下坡的测试图。纵坐标为角度,横坐标为斜坡长度。
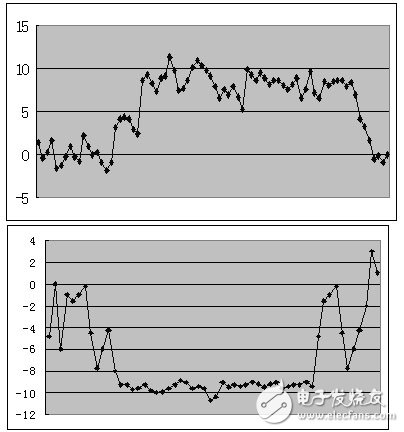
图3上下坡角度实测图