0 引 言
BLDC电机与传统有刷电机相比,具有更高的能效、更长的使用寿命、更紧凑的外形、更低的噪音和更高的可靠性,这些优点使得BLDC愈来愈多地出现在汽车应用中,用来取代传送带和液压系统,提供额外功能和提高燃油经济性,同时消除维护成本。由于电励磁必须与转子位置同步,因此BLDC 电机在运行时,通常需要一个或多个转子位置传感器。由于成本、可靠性、机械包装的原因,特别是当转子在液体中运行时,电机适宜在无位置传感器的条件下运行,即通常所说的无传感器运行。
对于汽车用BLDC控制系统来说,希望能做到PCB尺寸小,BOM成本低以及简单可靠,低功耗等特点,针对这系列的需求,飞思卡尔半导体推出针对汽车三相无刷电机的单芯片解决方案S12ZVM家族。S12ZVM是目前市场上集成度最高的无刷直流(BLDC)电机控制解决方案,有助于加快从直流(DC)到BLDC电机的过渡。
1 S12ZVM特点
飞思卡尔S12ZVM系列是具有突破性的技术,它将MCU、MOSFET栅极驱动单元、电压调节器和本地互联网络 (LIN) 物理层这四个系统元素结合到一个单芯片解决方案中,如图1。通常实现这四个功能需要两至四个芯片。与其它分立式解决方案相比,飞思卡尔通过片上集成将印刷电路板所占物理空间减少了50%。同时汽车制造商不断寻求可减轻汽车重量和降低功耗的方法,因为这有助于提升燃油经济性。电子系统供应商和电机制造商也正在迎合这一趋势,但是在面对定制的解决方案时,他们获得的解决方案往往不是最优的,或不具有可扩展性。S12ZVM系列提供诸多不同的产品版本,支持CAN和LIN通信协议,具有多种存储器容量和封装选项。 这将允许客户可重复使用硬件和软件设计,为空调风机、雨刮器、燃油泵和水泵等应用开发真正的平台解决方案。
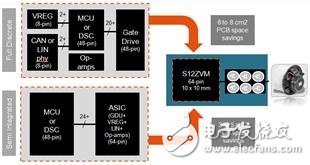
图1 S12ZVM集成方案
2 无传感BLDC控制系统设计
如图2所示,三相BLDC电机控制可采用三相六拍的控制方法,每隔60个电角度进行换向控制,同时对三相桥PWM控制可采用单极性控制策略,上桥采用PWM控制,下桥可直接导通与地相连,其优点在于控制简单,较低的MOS管开关损耗及较低的EMC噪音。
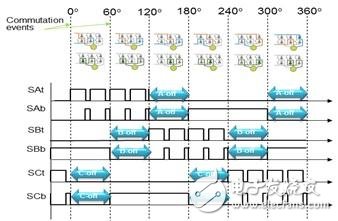
图2 三相六拍单极性控制策略
图3为采用S12ZVM的无传感BLDC控制系统设计框图,除了三相桥与采样电阻之外,整个控制都可以由S12ZVM内部来实现。当采用三相六拍控制策略时,只需要一个采样电阻来检测电流的大小,S12ZVM内部有运放可以对电流信号进行放大并通过AD模块进行采样,同时还可以将放大的电流信号经过比较器与给定的电压进行比较做过流保护。图中蓝色部分为S12ZVM的硬件模块,而绿色部分则由软件来实现功能。AD模块采样相电压,DCBUS电压和工作电流,经过过零点检测算法来确定换向控制并计算BLDC实际速度,速度环的PI控制器对实际速度和设定速度差值进行计算,从而决定PWM的占空比来控制BLDC电机转动力矩,保证实际速度按照设定的速度运行。
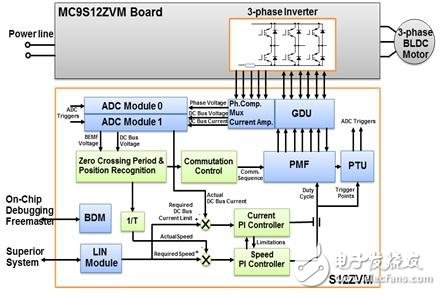
图3 S12ZVM BLDC无传感控制框图
由于无法确切知道BLDC无传感电机的初始位置,其启动过程要比带Hall传感器BLDC电机的启动过程复杂。如图4所示,其启动过程包括Alignment阶段,Open Loop StarTIng阶段及最终的Run阶段。在Alignment阶段,控制器同时施加相同占空比的PWM给A相与B相,C相则与地相连,这样就将BLDC电机稳定在一个已知的位置。占空比的大小与持续的时间取决于BLDC电机特性和负载大小,通常持续时间在100ms到500ms之间。当Alignment过程结束后,就进入Open Loop StarTIng阶段,由于反电动势与转子转速成正比,在极慢的转速下反电动势的幅值很低,很难检测到过零点。因此,当电机从静止状态启动时必须采用开环控制,待有足以检测到过零点的反电动势时,才转而采用反电动势检测控制并进入Run阶段。当进入到Run阶段后,BLDC就采用速度闭环控制,过零点由反向电动势检测所得。
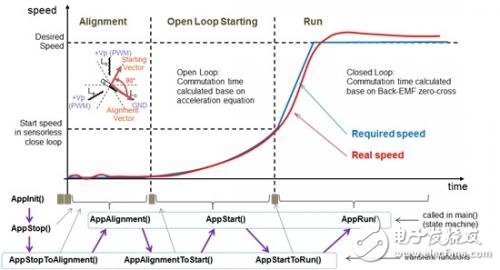
图4 BLDC无传感控制启动流程