Hopfield网络求解TSP两种改进算法的仿真研究
1 引言
用Hopfield神经网络求解旅行商问题(TSP),给组合优化完备性问题的求解提供新的方法。但该算法会经常生成无效解,因此需进一步改进。有学者通过TSP网络的动态分析修正TSP的能量函数,从而获得有效解,但其能量函数的表达式过于复杂。有人简化该能量函数,进一步提出改进算法。这里拟对典型的两种改进算法进行仿真分析。
2 HopfieId网络的能量函数
为将TSP问题映射成神经网络的动态过程,Hopfield采取置换矩阵的表示方法,用N&TImes;N个神经元组成Hopfield人工神经网络表示商人访问N个城市。
网络达到稳定状态时各神经元的状态对应置换矩阵各元素的值(“1”或“0”)。用uxi表示神经元(x,i)的输出,相应的输入用Vxi表示。
若城市x在i位置上被访问,则Vxi=1,否则Vxi=0。Hop-field定义如下形式的能量函数:

式中,A、B、C、D是实系数。dxy为城市x与y之间的距离。
式中前3项是问题的约束项。最后1项是优化目标项。利用动态方程:
![]()
式中,VT表示V的转置。
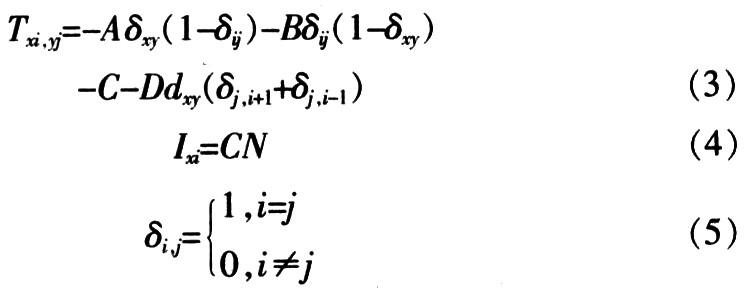
求得A、B、C、D和d描述的连接矩阵和及偏置,的表达式:
Hopfield把能量函数的概念引入神经网络,从而开创求解优化问题的新方法。但该算法会以大百分比生成无效解,因此需进一步改进。
3 改进算法与仿真
3.1 改进算法1
Aiyer等人从理论上证明Hopfield网络不能生成有效解的原因,并提出一个新的连接矩阵:
外部输入
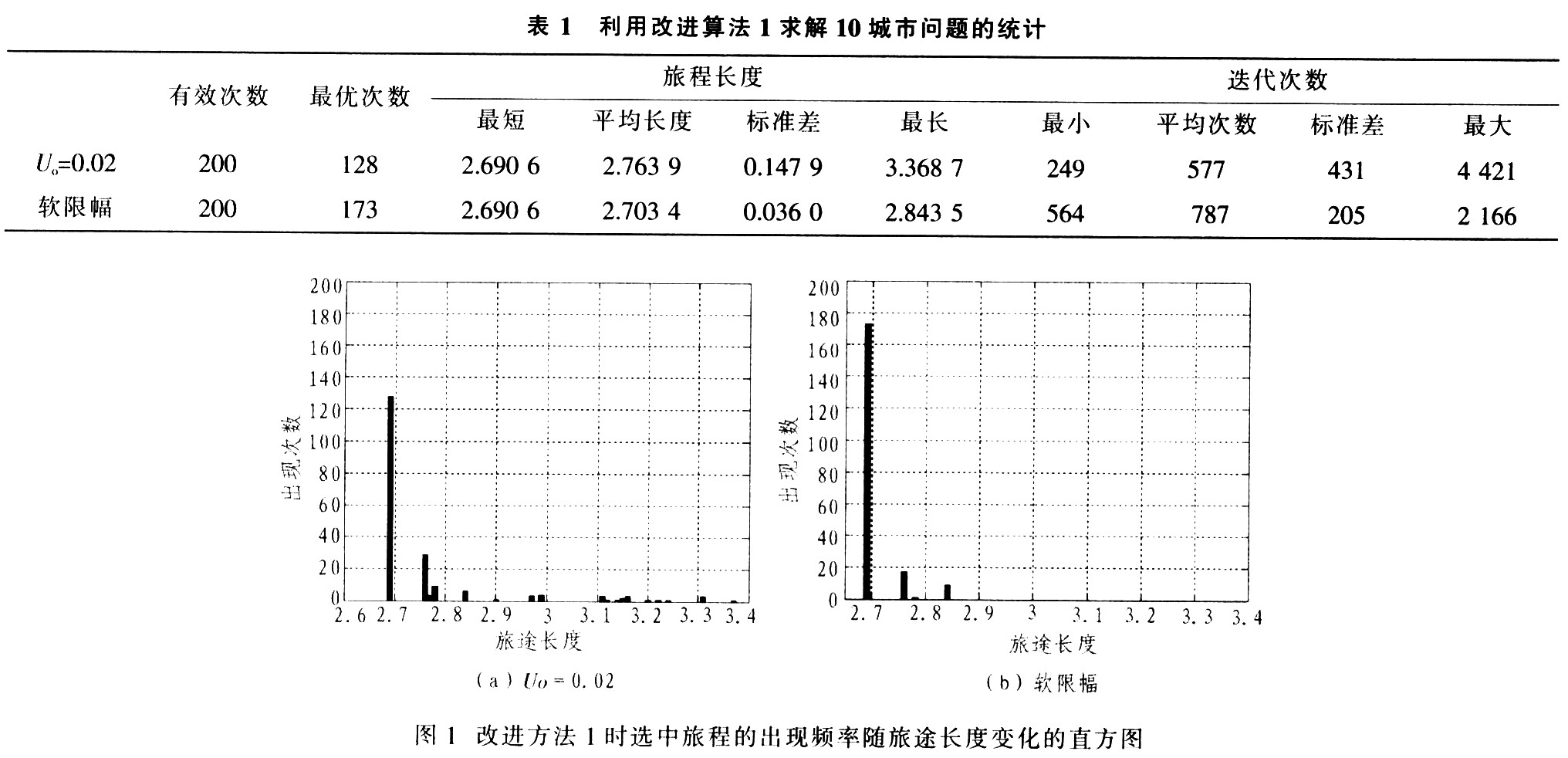
可从理论上证明该算法的有效性,试验也验证它几乎100%可获得有效解。利用上述改进算法对Hopfield的10城市问题进行模拟试验,已知其最短路径为2.690 6。模拟试验采用两种神经元状态更新函数,一种采用S型函数,即

另一种采用如下定义的软限幅函数:
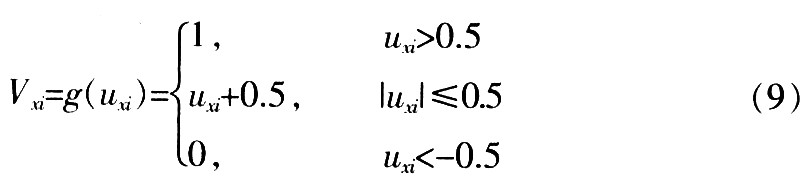
它是线性化近似的一种合理选择。图1给出软限幅函数及双曲正切函Uo取0.02时的曲线图。对于每种情况,从起始条件出发模拟运行200次,每次模拟在达到下列两条件之一时终止运行:(1)网络中的每个神经元均在[0.9,1]或[0,0.1]之间取值,分别对应神经元的“激活”(取值落在[0.9,1]中)或“抑制”状态(取值落在[0,0.1]中),并且矩阵的每行每列恰有一个非零元素;(2)运行迭代次数大于10 000次。注意,没有以dE/dt=0判别迭代结束。因为满足dE/dt=0的点不一定是E的极小点或最小点,也可能是拐点。其次,即使是E的极小点,继续迭代有可能跳出这个极小点。取A=B=8,A1=7.75,D=2,步长δt=0.02,测试结果如表1和图1所示。由测试结果可知,软限幅的效果明显优于硬限幅,因为软限幅与线性化近似极为相似,但所需的收敛次数较多。
研究表明,在S型函数UO=2情况下,网络给不出任何有效的解答。因为网络中的神经元无法收敛于其稳态(“激活”或“抑制”)。
3.2 改进算法2
Aiyer通过TSP网络的动态分析修正TSP的连接矩阵,从而获得有效解,但其表达式过于复杂,影响优化效果。简化该能量函数:
首先检查式(1)的前3项,其中,第3项仅在网络输出全为0时起约束作用,否则前2项已保证第3项成立。对前2项作如下修改:

则第3项完全可省去。将优化目标项写成:
或
也可满足优化要求。则TSP的能量函数简化为:
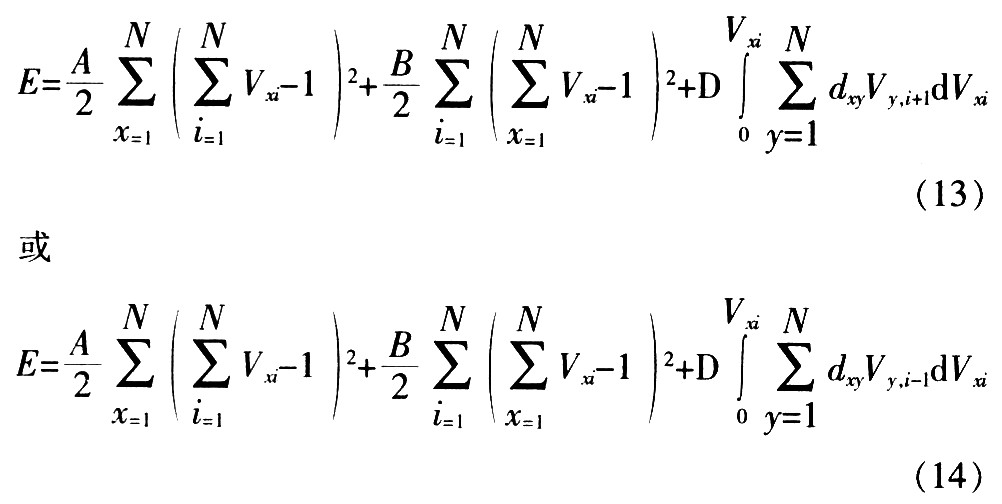
下面以式(13)作为研究对象,其对应的网络连接矩阵和外部输入分别是:

该算法可从理论上证明其有效性,仿真研究如下:取A=B=3,D=1,步长δt=0.05,对Uo=0.02和软限幅两种情况进行仿真,仿真终止条件与改进算法2相同。测试的统计结果如表2和图2所示。
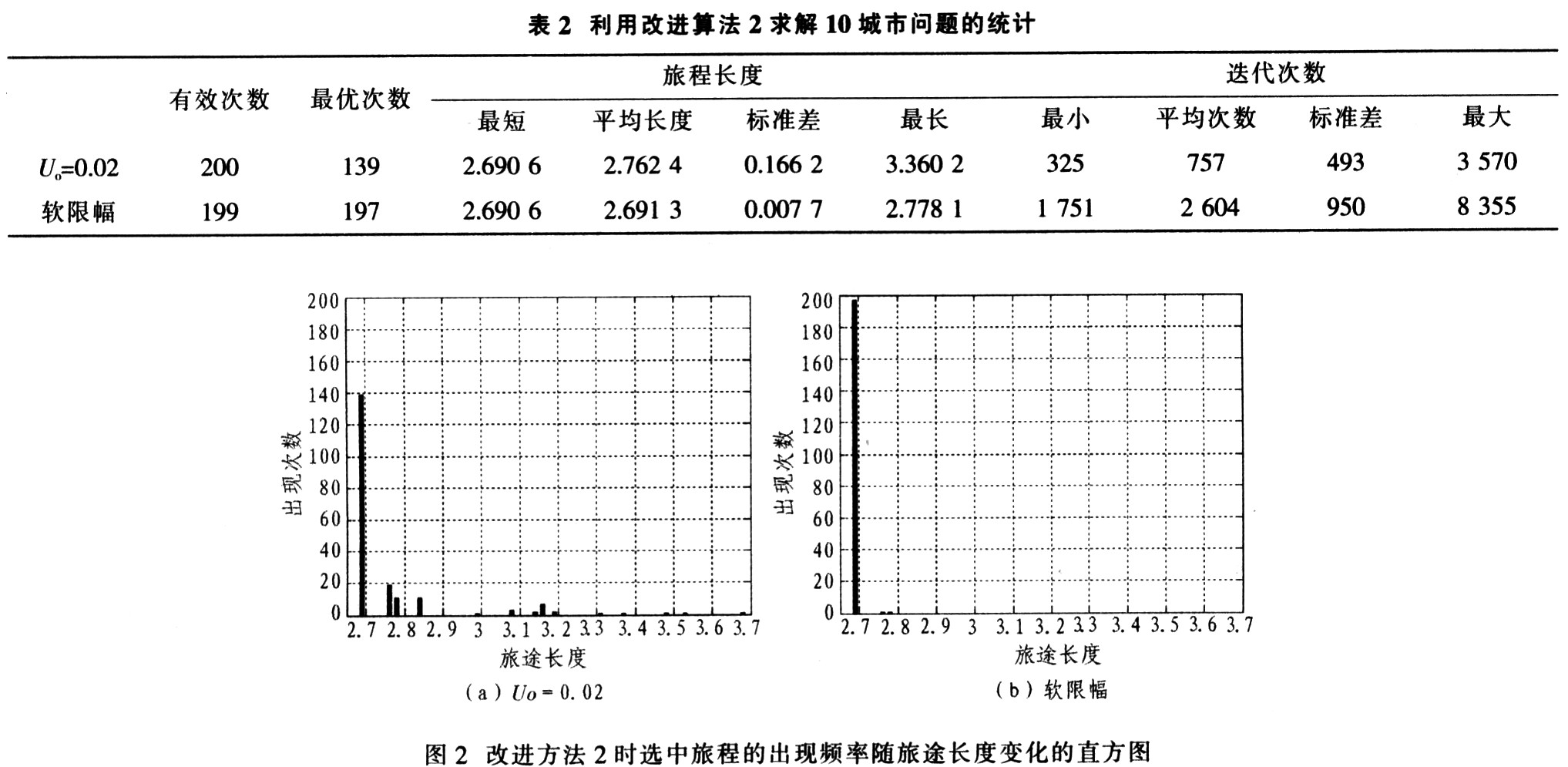
从测试结果可以看出,该方法获得的最优解的个数明显的多于改进算法1。软限幅的效果明显优于sigmold函数的效果。但所需的收敛次数较多。这一点与改进算法1是一致的。在使用软限幅时获得最优解的概率大于95%,只是所需迭代次数稍多。
4 结束语
对两种求解TSP的改进算法进行仿真研究,结果表明他们具有非常好的优化效果,在10城市问题上可近似100%的获得最优解。
另外,该算法还具有对参数敏感度低的优点。改进算法的缺点是所需迭代次数较多。当采用大步长迭代时,可降低收敛所需的迭代次数,但会影响优化效果。
这种影响对Uo=0.02的情况不明显,例如,在δt=0.5时,其优化效果与δt=0.05时几乎相同,所需迭代次数可降到450次左右。而对于软限幅的情况,步长的影响就明显了,δt= 0.5时,优化效果与图中Uo=0.02的情况差不多。下一步的工作拟采用变步长的方法,估计可大大降低所需的迭代次数。