文中采用红外线电子移位逐行高速扫描技术和超声波测距技术实现汽车定位,具有可调定位速度和适应恶劣天气的能力,还采用多种措施,提高系统的抗干扰能力和可维护性能,实现了快速、高精度、高可靠定位的目标。利用Delphi开发主控软件,实现数据处理,完成定位结果的显示、输出,工作参数设置和状态检测,具有良好的开放性,方便与各种控制系统接口。
1 工作原理和系统组成
1.1 工作原理
以透射式红外光电传感器和超声波测距装置相结合可实现对平面区域内物体的定位。透射式红外光电传感器由红外发射模块和红外接收模块组成,当收发模块之间有物体遮挡光路时,将改变接收模块的接收状态,据此可非接触探测物体是否存在。
如果把多个发射模块和多个接收模块按固定间隔平行排列成两排,让收发两侧对应位置上的红外模块一对一对地按顺序轮流接通工作,对其间区域进行逐行扫描探测,则依据扫描结果不但可判断该区域是否有物体存在,还可计算出物体的长度及其在该区域中的纵向相对位置。
超声波测距通常采用渡越时间法,收发头与被测物体之间的距离:
式中,v为超声波在介质中的传播速度;t为超声波的往返时间间隔。分别在物体两侧标定位置安装超声波测距装置,测出与物体的距离,就可计算出物体的宽度及其在该区域中的横向相对位置。
1.2 系统组成
图1为基于声光探测的汽车定位系统的组成。
图中单片机1、红外发射阵列、红外接收阵列和电子移位电路构成红外线电子移位逐行扫描电路,用于车箱长度和纵向停车位置的测量。单片机2和4个超声波测距装置构成的测距系统,用于车箱宽度和横向停车位置的测量。
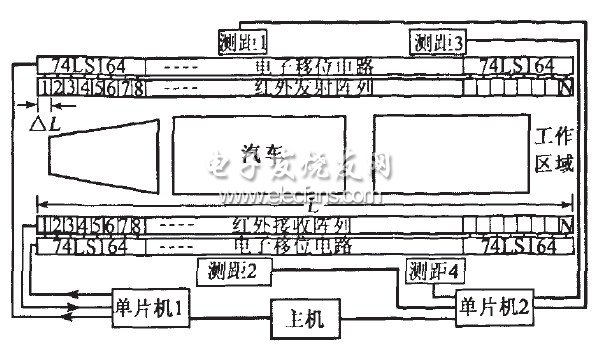
图1 系统组成
其中红外发射阵列和红外接收阵列安装于工作区域两侧车箱中部的高度,分别由N个发射模块和N个接收模块组成,它们均匀平行排列,收发一一对应。4个超声波测距装置安装在工作区域两侧,分成两组,分别测量前部车箱和后部车箱。
主机对纵向检测和横向检测的数据进行综合处理和分析,判断出工作区是否有车、哪种车型,并计算出汽车在区域中的停车位置参数和车箱几何参数。