通信设计中考虑协议的灵活性,经常把协议设计成“不定长度”。一个实例如下图:锐米LoRa终端的通信协议帧。

如果一个系统接收上述“不定长度”的协议帧,将会有一个挑战--如何高效接收与解析。
为简化系统设计,我们强烈建议您采用“状态机”来解析UART数据帧,并且把解析工作放在ISR(中断服务程序)完成,仅当接收到最后一个字节(0x0D)时,再将整个数据帧提交给进程处理。该解析状态机的原理如下图所示:

那么ISR处理这个状态机来得及吗?答案是:so easy!因为它只有3个动作,运算量十分小:
比较接收数据 -》 更新状态变量 -》 存储接收数据,C语言仅3条语句,翻译成机器指令也不超过10条。
代码清单如下:
/**
* @brief Status of received communication frame
*/
typedef enum
{
STATUS_IDLE = (uint8_t)0,
STATUS_HEAD, /* Rx Head=0x3C */
STATUS_TYPE, /* Rx Type */
STATUS_DATA, /* Data filed */
STATUS_TAIL, /* Tail=0x0D */
STATUS_END, /* End of this frame */
} COMM_TRM_STATUS_TypeDef;
/**
* @brief Data object for received communication frame
*/
typedef struct
{
uint8_t byCnt; /* Count of 1 field */
uint8_t byDataLen; /* Length of data field */
uint8_t byFrameLen; /* Length of frame */
COMM_TRM_STATUS_TypeDef eRxStatus;
uint8_t a_byRxBuf[MAX_LEN_COMM_TRM_DATA];
} COMM_TRM_DATA;
/**
* @brief Data object for received communication frame.
* @note Prevent race condition that accessed by both ISR and process.
*/
static COMM_TRM_DATA s_stComm2TrmData;
/**
* @brief Put a data that received by UART into buffer.
* @note Prevent race condition this called by ISR.
* @param uint8_t byData: the data received by UART.
* @retval None
*/
void comm2trm_RxUartData(uint8_t byData)
{
/* Update status according to the received data */
switch (s_stComm2TrmData.eRxStatus)
{
case STATUS_IDLE:
if (COMM_TRM_HEAD == byData) /* Is Head */
{
s_stComm2TrmData.eRxStatus = STATUS_HEAD;
}
else
{
goto rx_exception;
}
break;
case STATUS_HEAD:
if (TYPE_INVALID_MIN 《 byData && byData 《 TYPE_INVALID_MAX) /* Valid type */
{
s_stComm2TrmData.eRxStatus = STATUS_TYPE;
}
else
{
goto rx_exception;
}
break;
case STATUS_TYPE:
if (byData 《= MAX_LEN_UART_FRAME_DATA) /* Valid data size */
{
s_stComm2TrmData.eRxStatus = STATUS_DATA;
s_stComm2TrmData.byDataLen = byData;
}
else
{
goto rx_exception;
}
break;
case STATUS_DATA:
if (s_stComm2TrmData.byCnt 《 s_stComm2TrmData.byDataLen)
{
++s_stComm2TrmData.byCnt;
}
else
{
s_stComm2TrmData.eRxStatus = STATUS_TAIL;
}
break;
case STATUS_TAIL:
if (COMM_TRM_TAIL == byData)
{
/* We received a frame of data, now tell process to deal with it! */
process_poll(&Comm2TrmProcess);
}
else
{
goto rx_exception;
}
break;
default:
ASSERT(!“Error: Bad status of comm2trm_RxUartData()。\r\n”);
break;
}
/* Save the received data */
s_stComm2TrmData.a_byRxBuf[s_stComm2TrmData.byFrameLen++] = byData;
return;
rx_exception:
ClearCommFrame();
return;
}
相关热词:#物联网
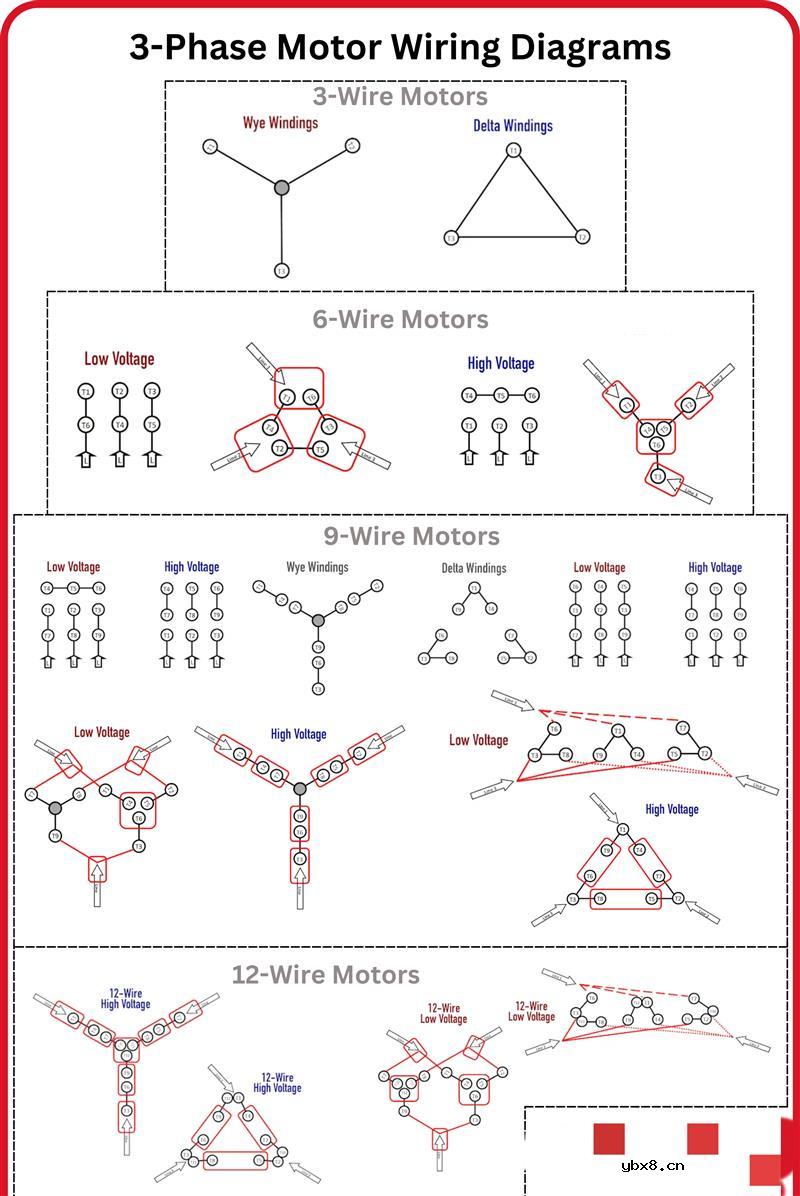 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
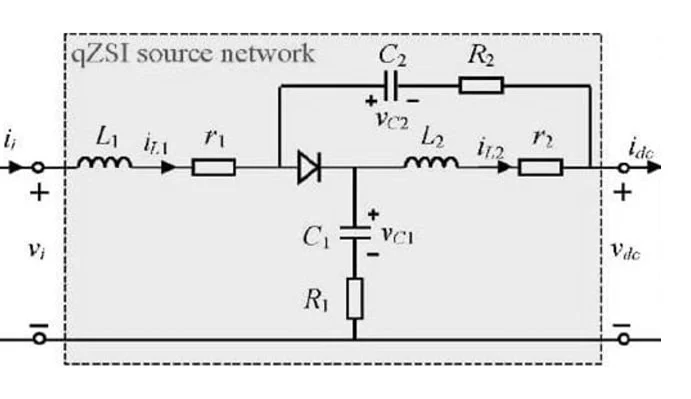 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
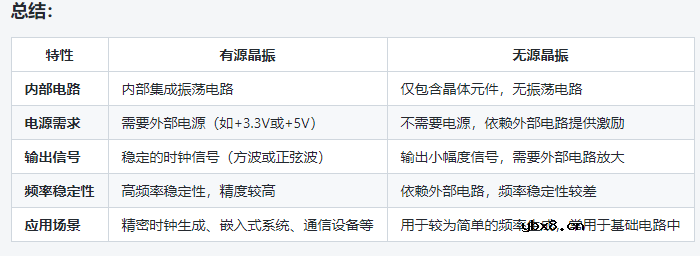 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
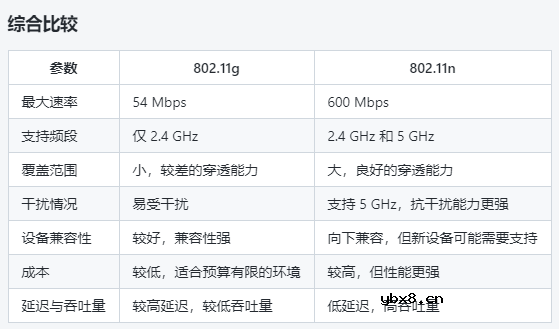 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
 GoKit3的硬件电路原理
GoKit3的硬件电路原理
时间:2026-03-06
 如何搭建一个私有云平台
如何搭建一个私有云平台
时间:2026-03-06
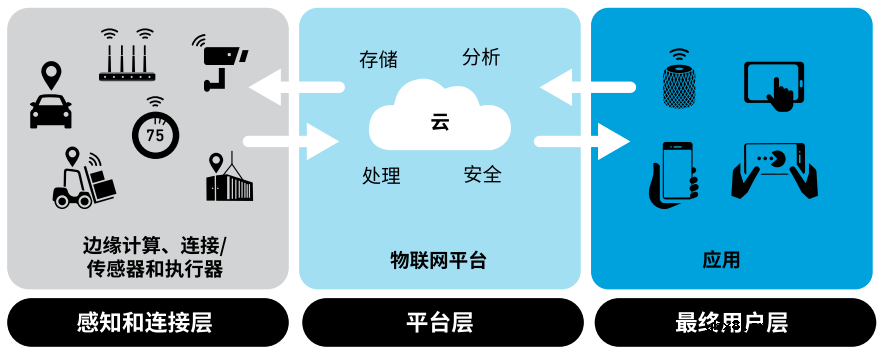
 一文了解物联网(IoT)的多维挑战
一文了解物联网(IoT)的多维挑战
时间:2026-03-06
 基于 STM32和机智云物联网平台的农作物需水...
基于 STM32和机智云物联网平台的农作物需水...
时间:2026-03-06
 如何实现热水器的远程控制功能
如何实现热水器的远程控制功能
时间:2026-03-06
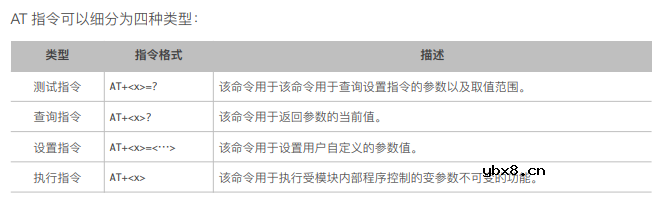 物联网中常用指令——AT命令
物联网中常用指令——AT命令
时间:2026-03-06
 物联网的前世今生:什么是物联网?实现物联...
物联网的前世今生:什么是物联网?实现物联...
时间:2026-03-06
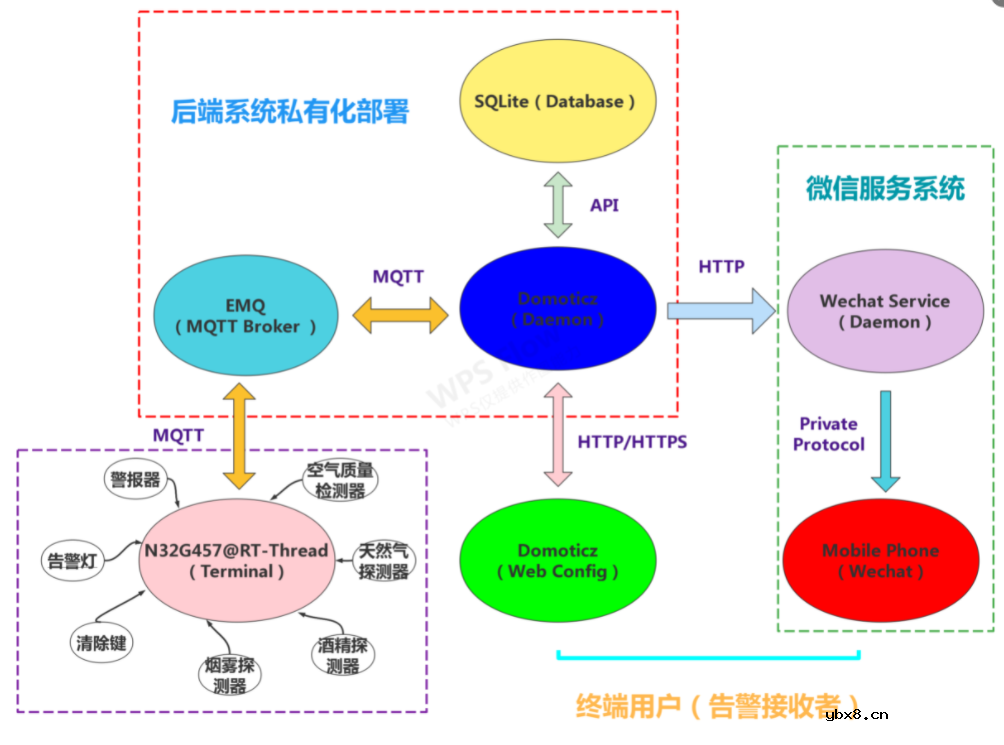 基于N32G457和RT-Thread打造的私有化定制家...
基于N32G457和RT-Thread打造的私有化定制家...
时间:2026-03-06
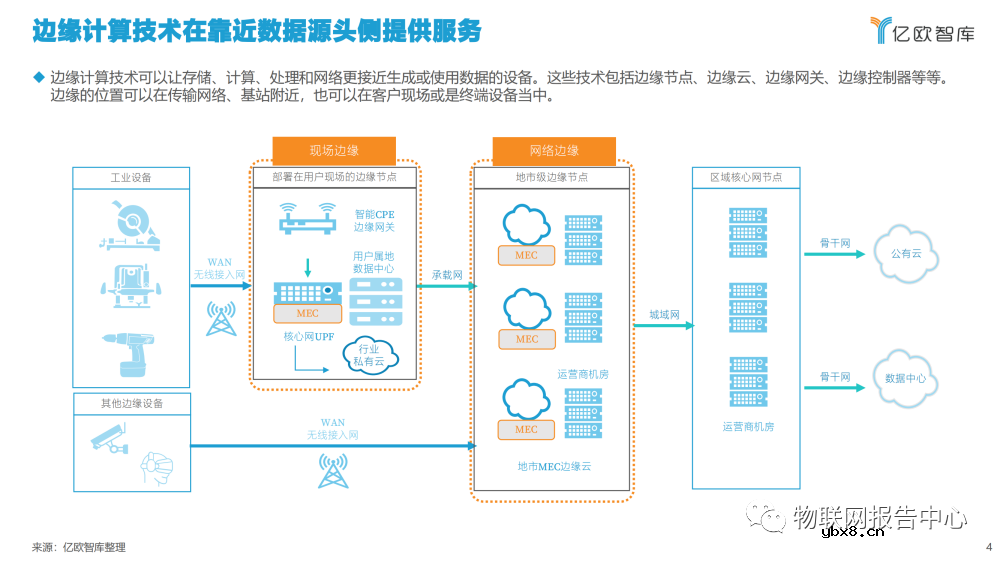 2022边缘计算产业发展现状分析
2022边缘计算产业发展现状分析
时间:2026-03-06
 朗骏智能推出四款全新的可联网智能光控产品
朗骏智能推出四款全新的可联网智能光控产品
时间:2026-03-06