商用旋变与伺服电机电角度相位的对齐方法主要分为以下几个步骤:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出;
2.然后用示波器观察旋变的SIN线圈的信号引线输出;
3.依据操作的方便程度,调整电机轴上的旋变转子与电机轴的相对位置,或者旋变定子与电机外壳的相对位置;
4.一边调整,一边观察旋变SIN信号的包络,一直调整到信号包络的幅值完全归零,锁定旋变;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,信号包络的幅值过零点都能准确复现,则对齐有效 。
撤掉直流电源,进行对齐验证:
1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;
2.转动电机轴,验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合。
这个验证方法,也可以用作对齐方法。
此时SIN信号包络的过零点与电机电角度相位的-30度点对齐。
如果想直接和电机电角度的0度点对齐,可以考虑:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;
4.一边调整,一边观察旋变的SIN信号包络的过零点和电机U相反电势波形由低到高的过零点,最终使这2个过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
以上是商用旋变与伺服电机电角度相位的对齐方法的基本步骤,需要根据实际情况进行灵活调整。
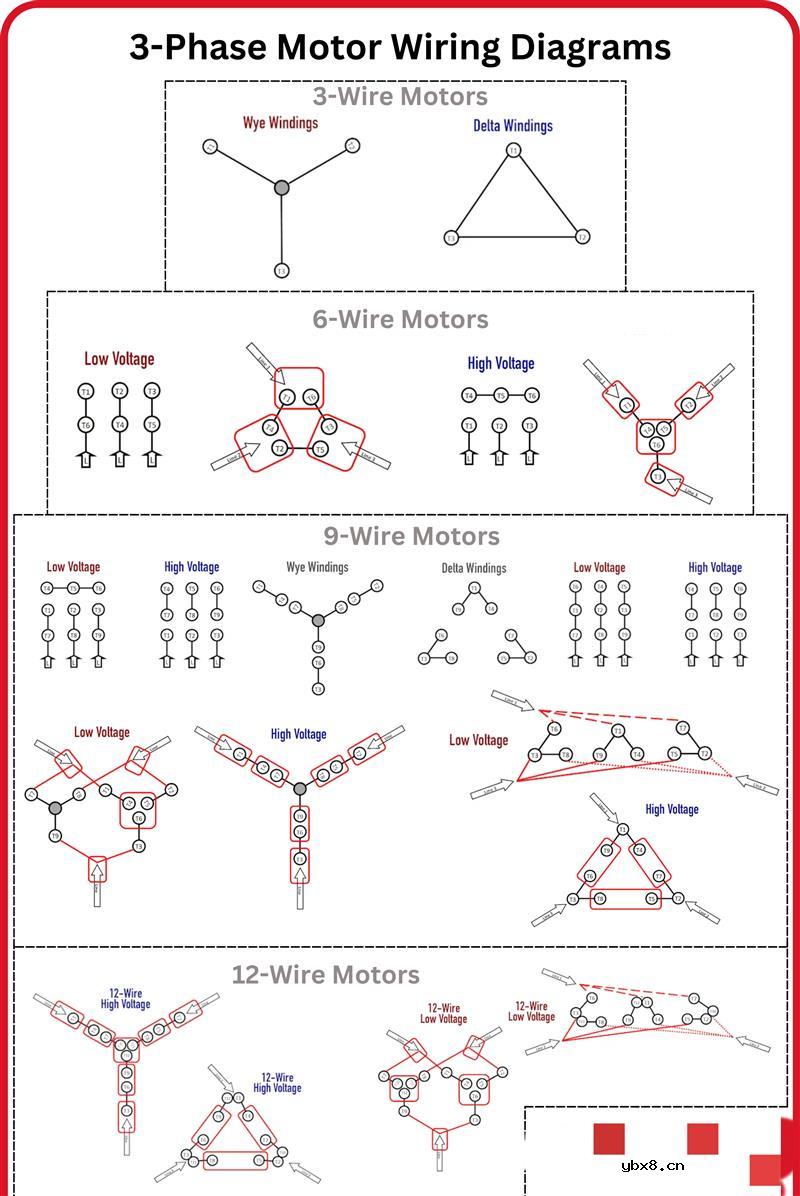 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
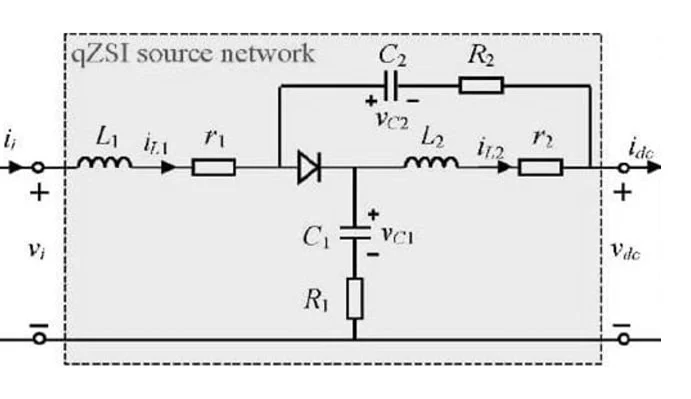 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
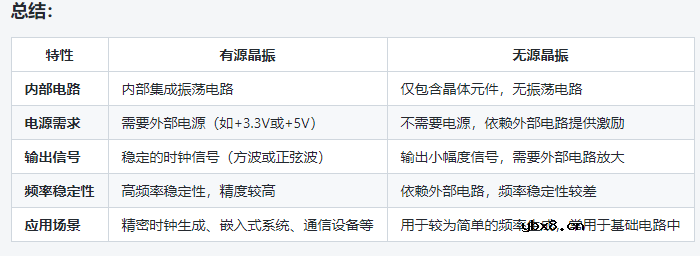 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
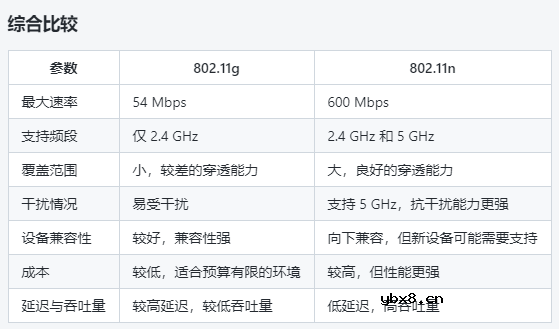 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
电阻的单位
时间:2026-03-05
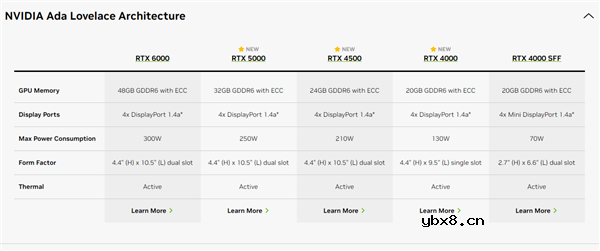 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
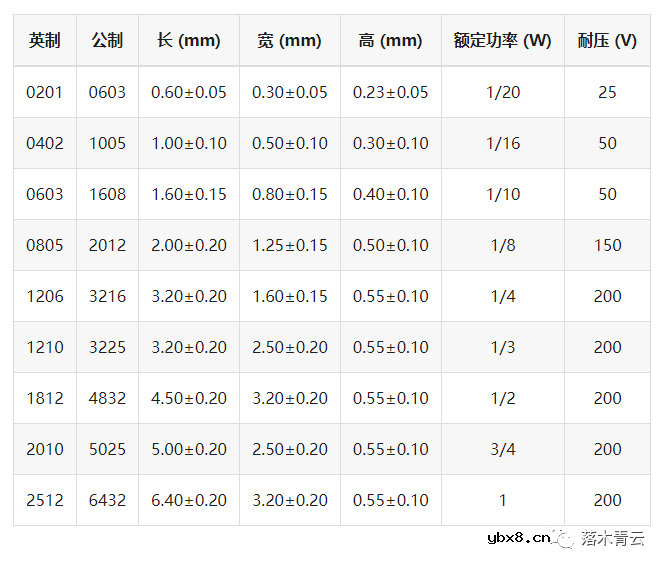
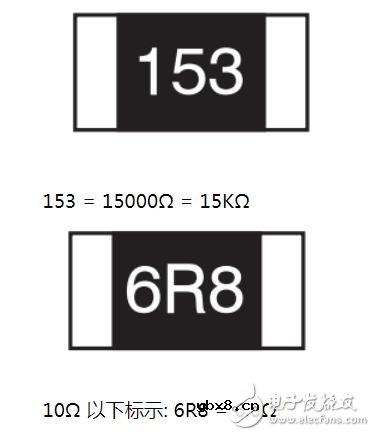 贴片电阻怎么看阻值
贴片电阻怎么看阻值
时间:2026-03-05
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
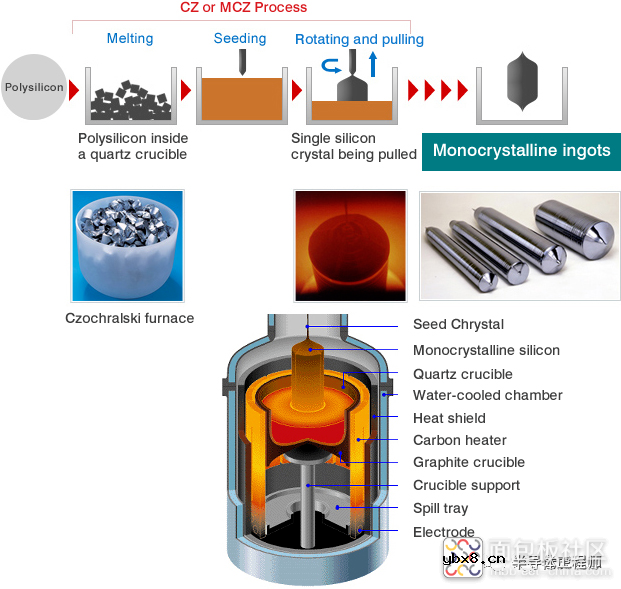 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
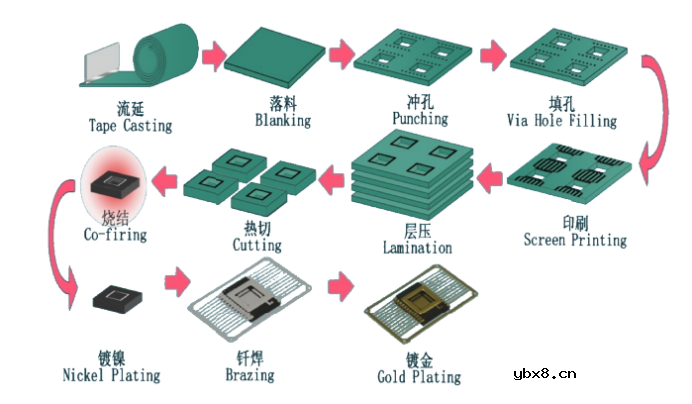 HTCC:半导体封装的理想方式
HTCC:半导体封装的理想方式
时间:2026-03-06
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
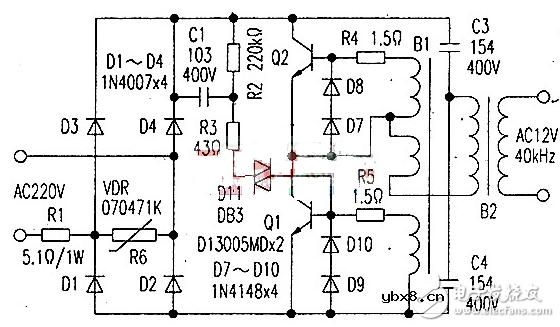 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
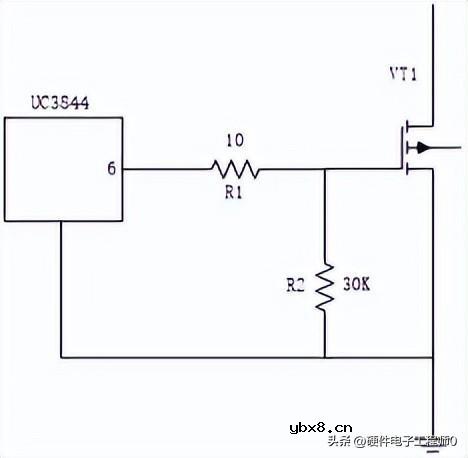 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09