四轮转向控制(4WS),四轮转向控制(4WS)是什么意思
四轮转向系统车辆转向时,后轮的旋转方向与前轮相反,以时转弯半径尽可能小并改善操纵特性,中速到高速客车的四轮转向系统发展历史较短,该技术的应用主要是改进操纵稳定性和转向响应性能,轿车的四轮转向系统具有以下两个功能:1、高速行驶时,以与前轮相同的方向转动后轮,减小整车的摇摆运动,从而改进转向稳定性;2、中低速行驶时,以与前轮相反的方向转动后轮,时低速行驶时转弯半径减小,中速行驶时转向响应性能得以改进。
1、4WS的基本原理
,四轮转向控制(4WS)是什么意思")
如图1所示,转弯时,转弯中心位于前后轮纵向平面法线交点处P(x0,y0),转弯半径按PQ或PO计算。当前后轮转动方向相反时,汽车转弯半径最小,否则转弯半径增大。即便是后轮不动,前轮转动,转弯半径也大于前后轮相反方向转动的半径。
,四轮转向控制(4WS)是什么意思")
如图2所示,后轮转角与前轮转角成一定的比例且方向一致时,转向性能类似2WS,但后轮以与前轮转动相同的方向转动时,横摆速度减小,中高速行驶时,汽车的转向稳定性和操纵能力均得以改善。
2、4WS的分类
表1所示为按汽车功能划分的4WS控制类型,表2为汽车结构划分的4WS控制类型。
,四轮转向控制(4WS)是什么意思")
,四轮转向控制(4WS)是什么意思")
最早的四轮转向系统是全机械式系统,这种系统是前轮转向响应型系统,后轮转向角由前轮转向角决定。
电液式四轮转向系统可分为车速/侧向加速度响应型和车速/前轮转向角/转向盘速度响应型两种。图3所示为车速响应型的电液四轮转向电子控制系统。
,四轮转向控制(4WS)是什么意思")
电液机械式四轮转向系统包括车速/前轮转向角响应型、车速/前轮转向角/摇摆速度响应型、机械液压型和电子液压型转向机构四种类型。
全电子式四轮转向系统是车速/前轮转向角/转向速度响应型系统,系统结构如图4所示,该系统后轮的转动决定于车速、车轮前轮转向角和转向盘转动速率,由带球螺旋杆齿条机构的直流电机执行器控制,该系统可同时改善汽车高速稳定性、提高转向盘快速转动下的转向响应并减小低速时的汽车转弯半径。
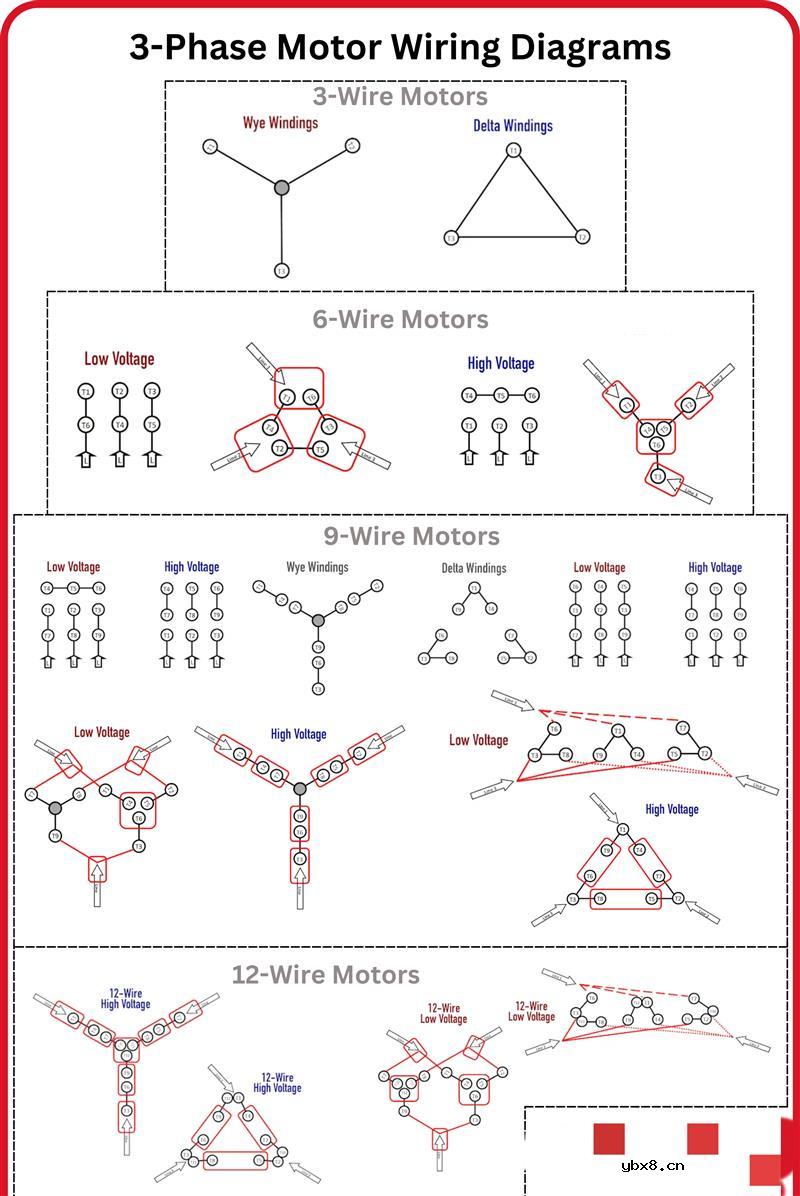 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
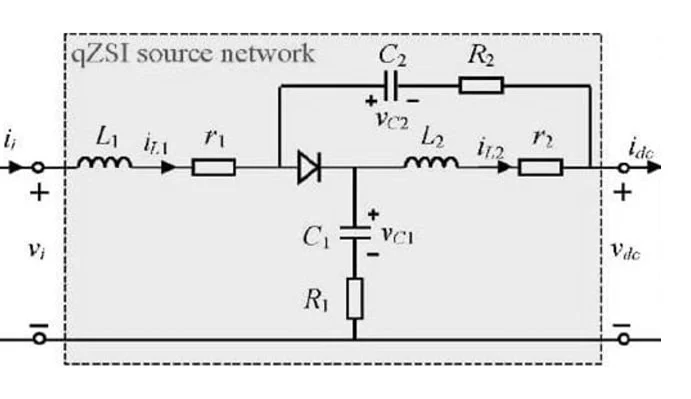 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
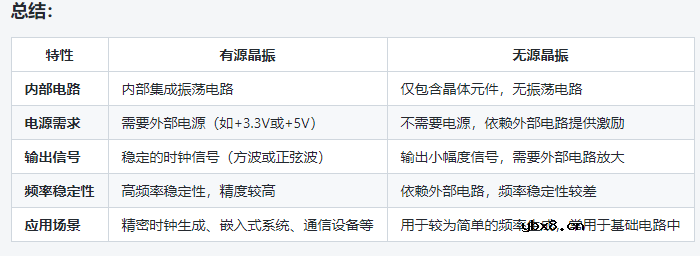 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
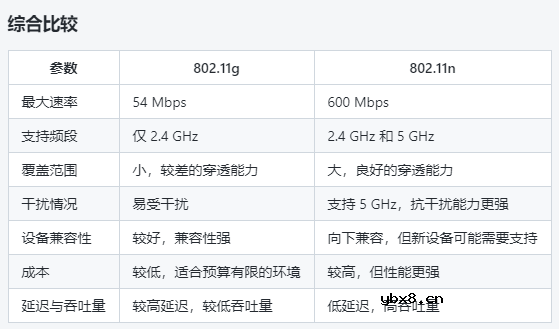 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
什么是追踪缓存/转接卡?
时间:2026-03-06
坐标基准
时间:2026-03-07
GPS接收机的分类
时间:2026-03-07
GPS的WAAS跟踪性能
时间:2026-03-07
什么是GPS旅行提示器/屏幕尺寸
时间:2026-03-07
GPS设备的动态性能
时间:2026-03-07
GPS的接口有哪些类型?
时间:2026-03-07
GPS设备的AV接口
时间:2026-03-07
GPS设备的差分模式
时间:2026-03-07
GPS设备的定位时间
时间:2026-03-07