随着人工成本的不断升高,用机器人代替人力去做一些重复性的高强度的劳动是现代机器人研究的一个重要方向。搬运机器人在导航寻迹中,需要后轮驱动电机和前轮舵机的协调工作。搬运机器人电机驱动有其特殊的应用要求,对电机的动态性能要求较高,能在任意时刻到达控制需要的指定位置并且使舵机停止在任意角度;电机驱动的转矩变化范围大,既有空载平整路面行使的高速度、低转矩工作环境,也有满负载爬坡的运行工况,同时还要求保持较高的运行效率。根据以上的技术要求,本文选用了控制技术成熟,易于平滑调速的直流电机作为搬运机器人的执行饥构。
功率驱动的设计
电机的供电电源是由24V的蓄电池提供,额定功率为240W,由4个75N75组成桥式电路来实现。75N75是MOSFET功率管,其最高耐压75V,最高耐流75A,电机驱动电路如图2所示。

Q1、Q4和Q2、Q3分别组成两个桥路,分别控制电机的正转和反转。高端驱动的MOS管导通时源极电压和漏极电压相同且都等于供电电乐VCC,所以要实现MOS管正常的驱动,栅极电压要比VCC大,这就需要专门的升压芯片IR2103。控制器产生的PWM信号输入HIN引脚,控制器I/O口输出的 EN1、EN2作为使能信号。输出端HO就可得到比VCC要高的电压,且高出的电压值正好是充在电容两端的电压。二极管提高导通速度,使得75N75的导通电阻更小,降低了开关管的损失。同时IR2103的两个输出口HO、LO具有互锁功能,防止由于软件或硬件错误造成的电机上下桥臂直通造成短路。
过流保护的设计
在电机控制系统中安装过流保护有两方面的意义:一是防止在电机正常运行时,电机出现超载或堵转而使得电枢绕组电流过大损害电机甚至引发火灾;另一方面是由于电机肩动时启动电流很大,往往不能直接启动,既需要等励磁绕组逐渐建立磁场后再正常运行,又希望电机以尽量快的速度肩动起来。有了过流保护对电流进行斩波,可以使电机安全快速地启动。过流保护原理图如图3所示。

电机的相电流通过康铜丝转换成电压信号Vtext,经过运算放大器放大后的模拟量AD1送至控制器A/D转换模块,同时将经过电压比较器比较后的数字量EVA送至控制器的外部中断口。针对搬运机器人的前轮转向舵机和后轮驱动电机的控制要求,采用以Cortex-M3为内核的STM32F107作为主控制器,采用嵌入实时操作系统μC/OS-II,将程序分成启动任务、电机转速控制任务、舵机控制任务等相对独立的多个任务,并设定了各任务的优先级。该系统能较好地实现搬运机器人的运动控制。
相关热词:#驱动电路
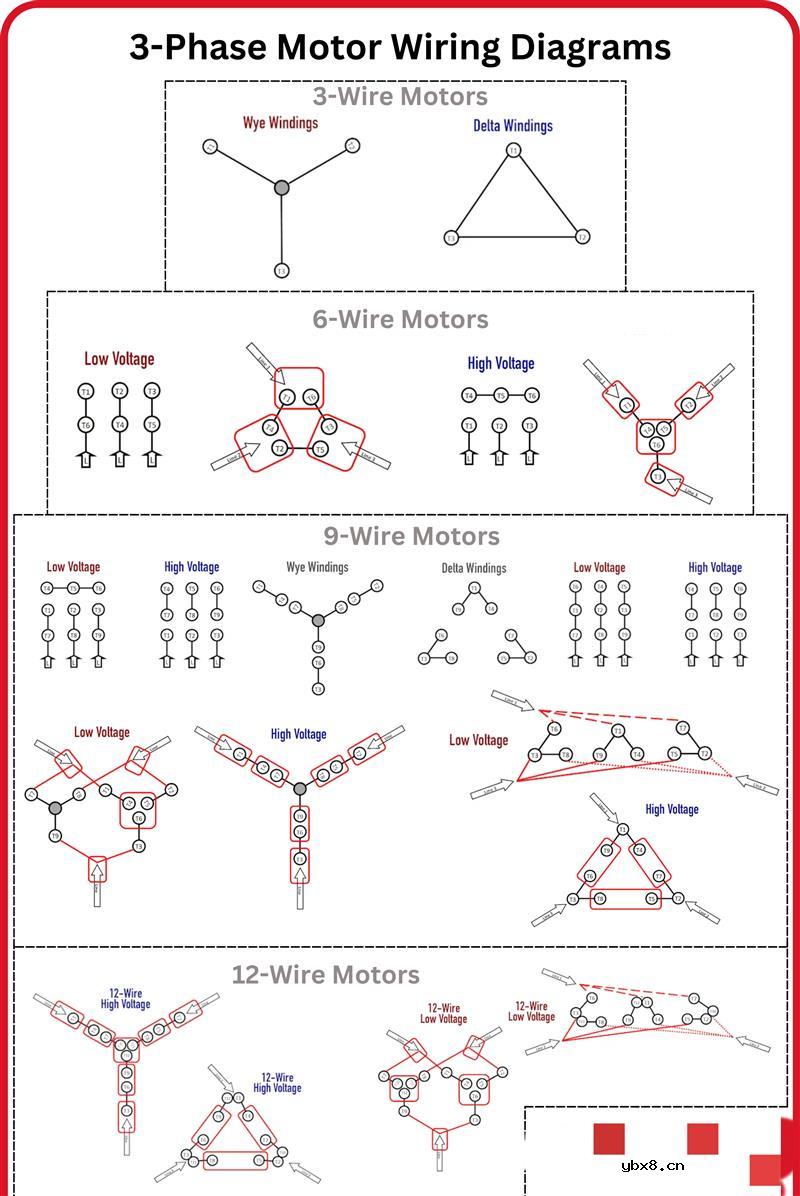 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
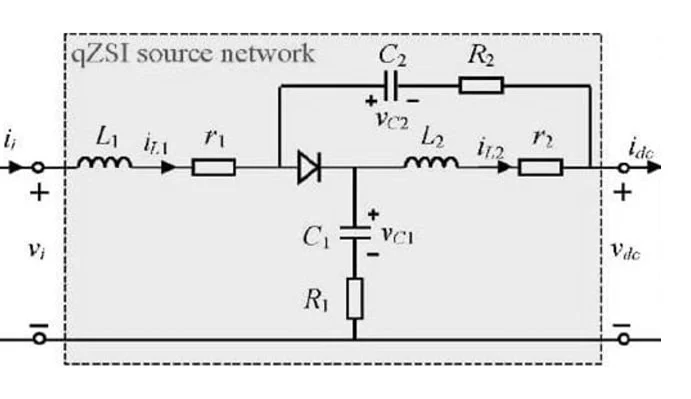 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
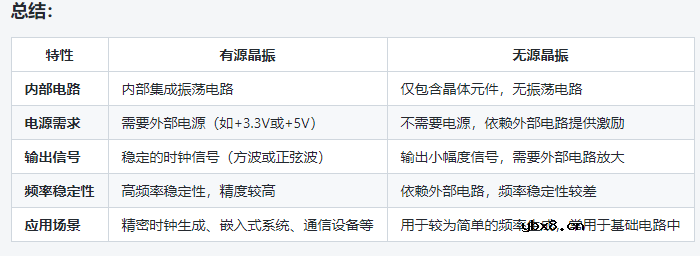 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
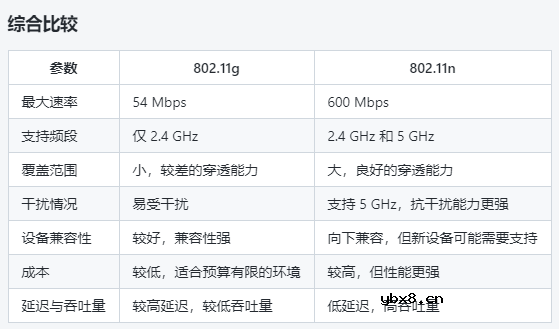 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
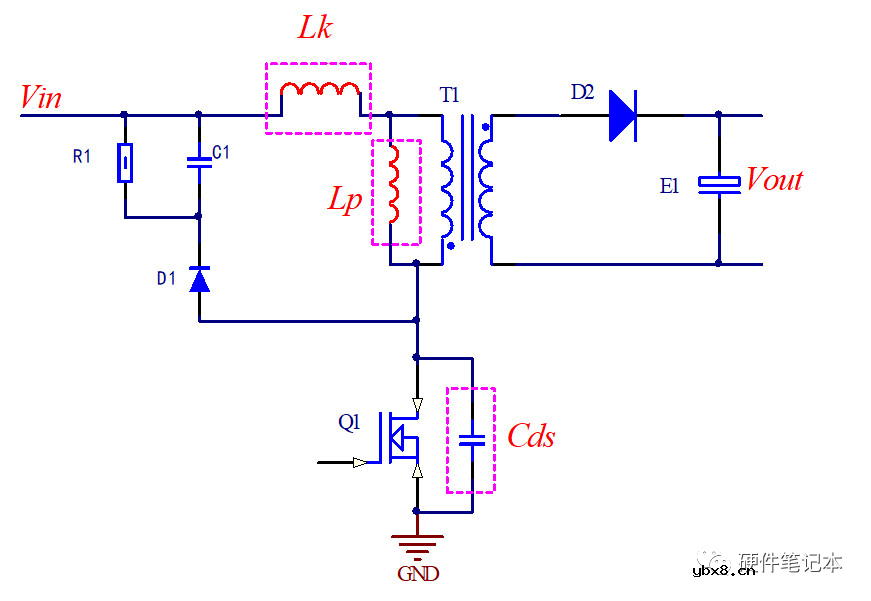 详解RCD钳位电路
详解RCD钳位电路
时间:2026-03-08
三相异步电动机的拆装详讲
时间:2026-03-04
三相异步电动机原理
时间:2026-03-04
 基于逻辑门的构成解释如何完成任意逻辑的管...
基于逻辑门的构成解释如何完成任意逻辑的管...
时间:2026-03-08
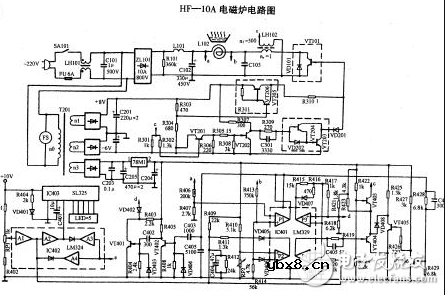 美的电磁炉电路图大全(六款美的电磁炉电路...
美的电磁炉电路图大全(六款美的电磁炉电路...
时间:2026-03-07
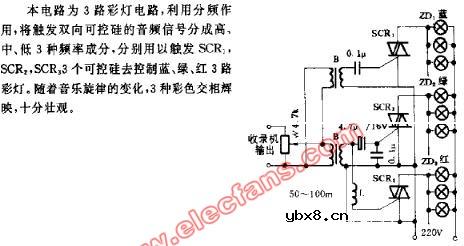 彩灯电路
彩灯电路
时间:2026-03-05
 NE555的有趣电路设计分享
NE555的有趣电路设计分享
时间:2026-03-08
 从0学电路,万用表演示测量三极管方法
从0学电路,万用表演示测量三极管方法
时间:2026-03-08
 光耦在电子电路中作用、关键参数详解
光耦在电子电路中作用、关键参数详解
时间:2026-03-08
 H桥电机驱动电路解析
H桥电机驱动电路解析
时间:2026-03-08