目前许多高等教育院校采用教育机器人进行课堂教学和培养学生的创新能力。本文设计的教育机器人通过红外光电传感器阵列检测路面信息并利用模糊自整定PID算法将采集的路面信息和电机运行数据进行实时处理,实现教育机器人的智能巡航并将机器人的状态显示输出。
电机驱动电路设计
本系统使用的直流电机额定电压为12 V,额定转速为300 rpm。电机驱动电路采用专用芯片L298N作为电机驱动芯片。用该芯片作为电机驱动,不仅稳定性好,大大地简化驱电路,而且驱动能力大,有利于电机转速的稳定。电机驱动电路如图2所示。

车速检测模块电路设计

教育机器人系统通过车速检测模块来读取当前车速。采用的方法是在后左右轮上分别粘贴一个均匀分布有黑白条纹的编码盘,利用图检测电路来对编码盘上的黑白条纹进行检测。当车轮转动时,红外接收管接收到的反射光强弱高低变化就会产生与车轮转速相对应的脉冲信号,将该脉冲信号进行放大整形后输入单片机的引脚P3.4和P3.5,记录单位时间内所得到的脉冲数,就能够表示出当前车左右轮子的速度,同时通过累加可以计算出小车所行走的路程。
主要介绍以STC12C5A60S2单片机为核心的教育机器人设计,阐述了教育机器人的硬件电路设计、软件模块以及控制算法设计。系统设计的红外光电检测阵列和模糊自整定PID控制器,使教育机器人在行走时更平稳,且控制方法简单、实用。该系统可用于无人驾驶、自动探测等人工智能等领域。
相关热词:#单片机
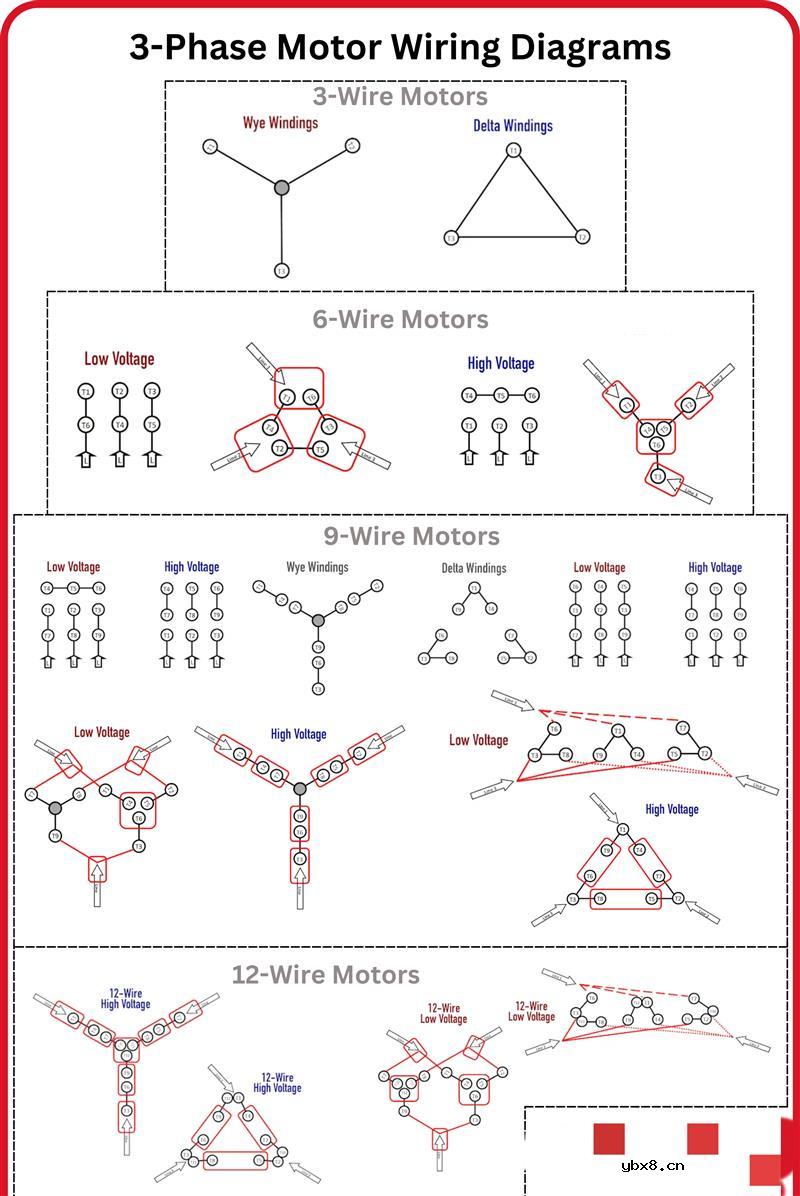 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
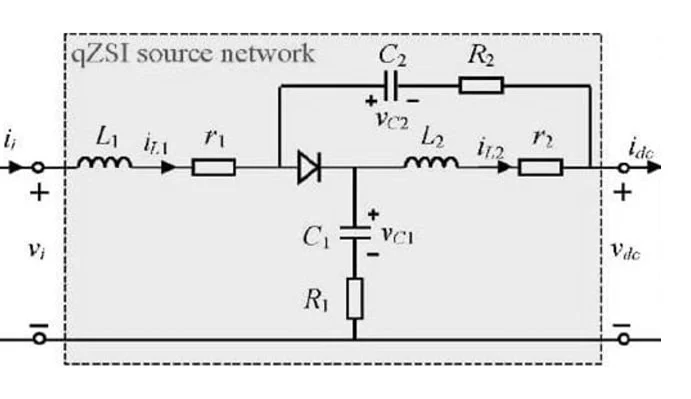 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
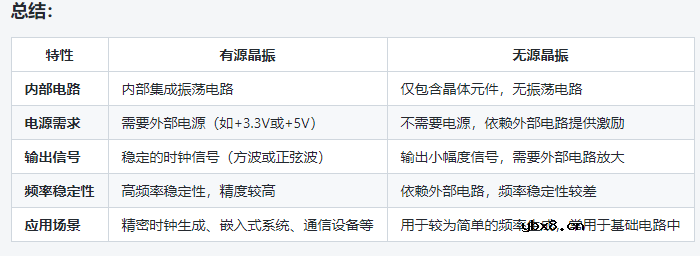 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
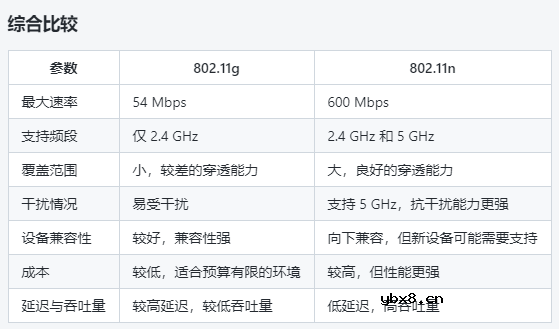 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
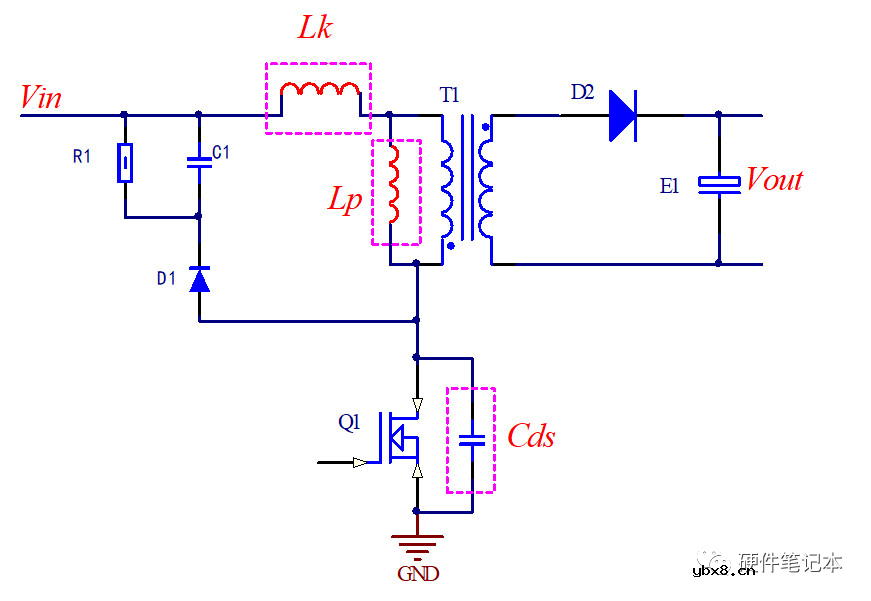 详解RCD钳位电路
详解RCD钳位电路
时间:2026-03-08
三相异步电动机的拆装详讲
时间:2026-03-04
三相异步电动机原理
时间:2026-03-04
 基于逻辑门的构成解释如何完成任意逻辑的管...
基于逻辑门的构成解释如何完成任意逻辑的管...
时间:2026-03-08
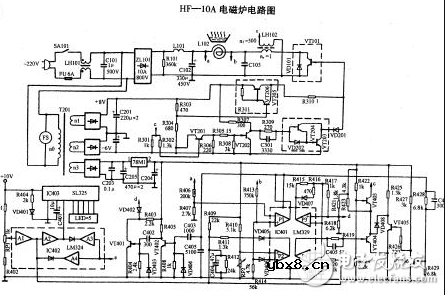 美的电磁炉电路图大全(六款美的电磁炉电路...
美的电磁炉电路图大全(六款美的电磁炉电路...
时间:2026-03-07
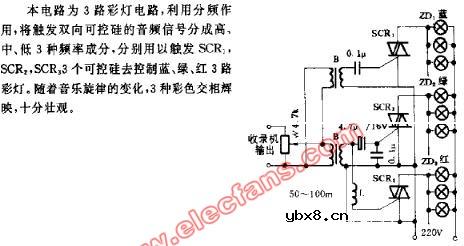 彩灯电路
彩灯电路
时间:2026-03-05
 NE555的有趣电路设计分享
NE555的有趣电路设计分享
时间:2026-03-08
 从0学电路,万用表演示测量三极管方法
从0学电路,万用表演示测量三极管方法
时间:2026-03-08
 光耦在电子电路中作用、关键参数详解
光耦在电子电路中作用、关键参数详解
时间:2026-03-08
 H桥电机驱动电路解析
H桥电机驱动电路解析
时间:2026-03-08