本文以586-Engine嵌入式芯片为核心,设计了某型无人机的飞行控制器,详细介绍了系统的硬件结构和相应的软件流程,并给出了仿真实验结果。586-Engine是TERN公司的基于AMD Elan SC520处理器的微控制模块,具有高可靠性、结构紧凑以及低功耗等特点,它同时具有功能强大的调试软件。586-Engine的主要参数指标如下:
(1)CPU为32位AMD Elan SC520,主频为133MHz;(2)具有高性能的浮点运算单元,支持正弦、正切、对数等复杂运算,非常适合需要复杂运算的应用。(3)配置512KB的SRAM,512KB的Flash,114字节内部RAM;(4)支持15个外部中断。共有7个定时器,包括一个可编程内部定时器,提供3个16位内部定时器和3个16位GP定时器,再加上一个软件定时器。这些定时器支持外部事件的计时和计数。软件定时器提供微秒级的硬件时间基准。
")
(5)提供32路可编程I/O,2个UART。共有19路12位A/D输入,包括11路ADC串行输入和8路并行ADC,转换频率为300kHz;6路D/A输出,包括2个串行输出DAC和4个输出并行12位DAC,转换频率为200kHz。
(6)工作温度为-40℃~80℃,尺寸为91.4mm×58.4mm×7.6mm。
飞行控制器硬件设计
该型无人机是为海军野战部队提供通讯中继用途的中型轮式无人机,其飞行控制器是一个单独装箱的小型航空机载电子设备,由DC/DC直流电源变换板、计算机主机板、模拟量通道板、开关量通道板和舵机控制板组成,全部模板通过母板上的总线方式连接,以减小尺寸,提高集成度。飞行控制器硬件结构如图1所示,实物图如图2所示。
下面详细介绍飞行控制器的数据采集、信息传输、控制量输出等问题。
(1)串口扩展
由图1可知,该飞行控制器需要与GPS、磁航向计和无线电高度表等进行通讯,共需5个串口。而586-Engine主板只提供2个串口,分别供地面检测和测控电台使用,因此需要进行串口扩展。串口扩展电路如图3所示。
")
串口扩展电路中采用TL16C754四通道UART并-串转换器件,将8位并行数据转换成4路串行输出,外加MAX202和MAX489电平转换芯片,扩展了2个RS232串口和2个RS422串口,可满足飞行控制器的硬件需求。
相关热词:#嵌入式
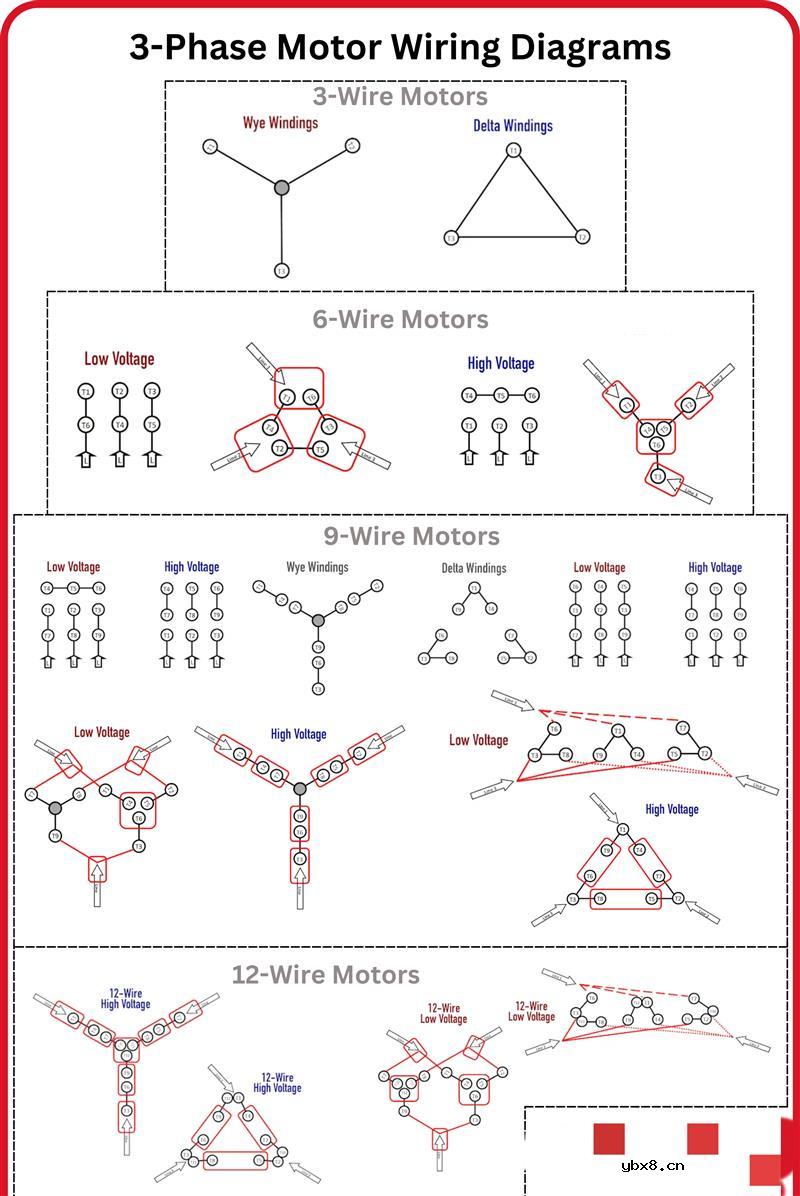 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
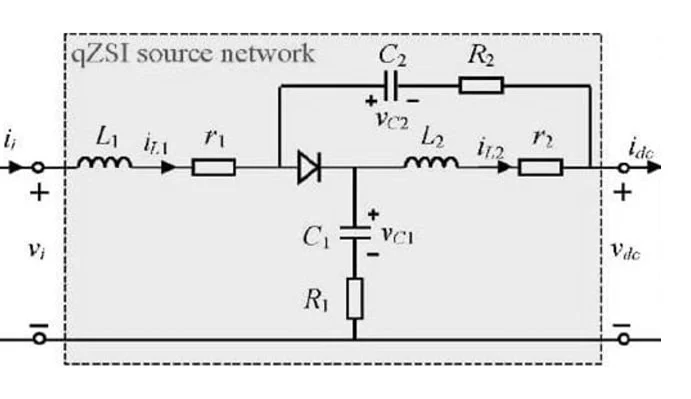 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
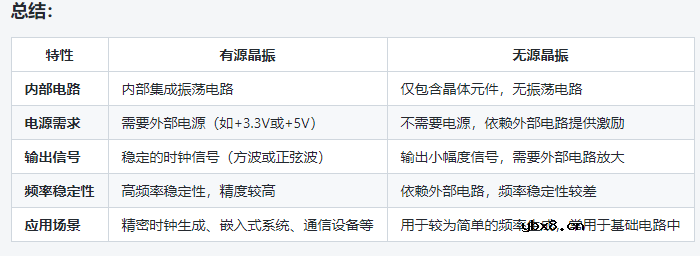 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
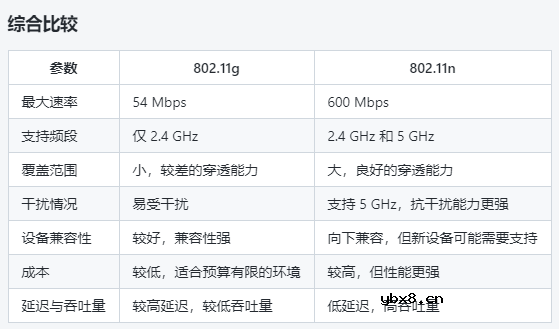 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
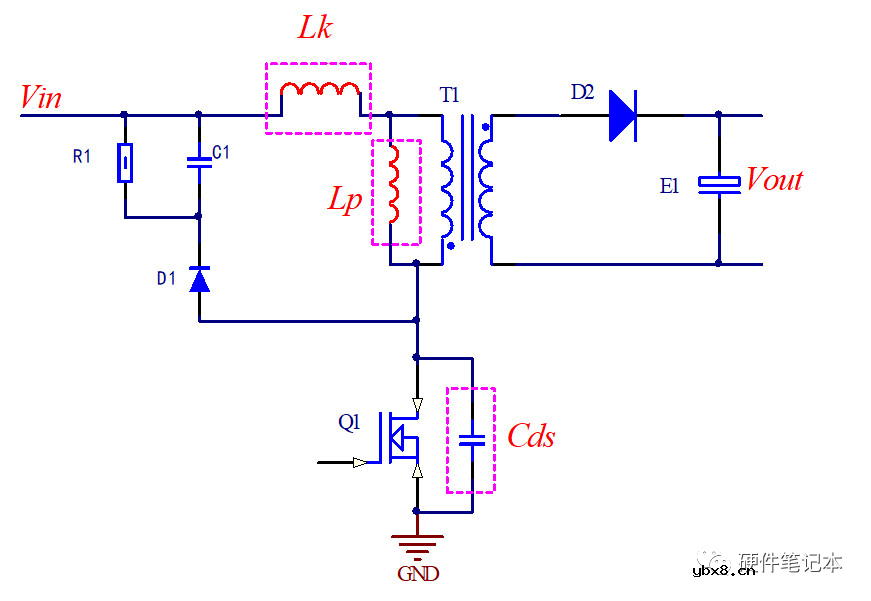 详解RCD钳位电路
详解RCD钳位电路
时间:2026-03-08
三相异步电动机的拆装详讲
时间:2026-03-04
三相异步电动机原理
时间:2026-03-04
 基于逻辑门的构成解释如何完成任意逻辑的管...
基于逻辑门的构成解释如何完成任意逻辑的管...
时间:2026-03-08
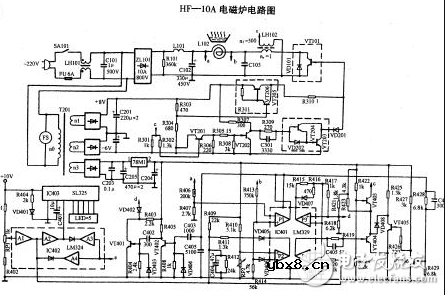 美的电磁炉电路图大全(六款美的电磁炉电路...
美的电磁炉电路图大全(六款美的电磁炉电路...
时间:2026-03-07
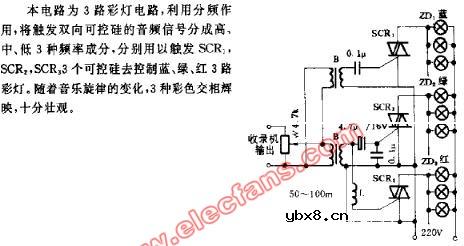 彩灯电路
彩灯电路
时间:2026-03-05
 NE555的有趣电路设计分享
NE555的有趣电路设计分享
时间:2026-03-08
 从0学电路,万用表演示测量三极管方法
从0学电路,万用表演示测量三极管方法
时间:2026-03-08
 光耦在电子电路中作用、关键参数详解
光耦在电子电路中作用、关键参数详解
时间:2026-03-08
 H桥电机驱动电路解析
H桥电机驱动电路解析
时间:2026-03-08