惯性传感器是一种传感器,主要是检测和测量加速度、倾斜、冲击、振动、旋转和多自由度(DoF)运动,是解决导航、定向和运动载体控制的重要部件。
(1)科里奥利(Coriolis)原理:也称科氏效应(科氏力正比于输入角速率)。该原理适用于机械式干式﹑液浮﹑半液浮﹑气浮角速率陀螺;挠性角速率陀螺;MEMS硅﹑石英角速率陀螺(含半球谐振角速率陀螺)等。Coriolis法国物理学家(1792年~1843年)。
(2)萨格纳(Sagnac)原理:也称萨氏效应(相位差正比于输入角速率)。该原理适用于光纤角速率陀螺;激光角速率陀螺等。Sagnac法国物理学家(1869年~1926年),居里夫妇的朋友。1913年发明萨氏效应。
惯性传感器包括加速度计(或加速度传感计)和角速度传感器(陀螺)以及它们的单、双、三轴组合IMU(惯性测量单元),AHRS(包括磁传感器的姿态参考系统)。
MEMS加速度计是利用传感质量的惯性力测量的传感器,通常由标准质量块(传感元件)和检测电路组成。
IMU主要由三个MEMS加速度传感器及三个陀螺和解算电路组成。
惯性传感器分为两大类:一类是角速率陀螺;另一类是线加速度计。
角速率陀螺又分为:机械式干式﹑液浮﹑半液浮﹑气浮角速率陀螺;挠性角速率陀螺;MEMS硅﹑石英角速率陀螺(含半球谐振角速率陀螺等);光纤角速率陀螺;激光角速率陀螺等。
线加速度计又分为:机械式线加速度计;挠性线加速度计;MEMS硅﹑石英线加速度计(含压阻﹑压电线加速度计);石英挠性线加速度计等。
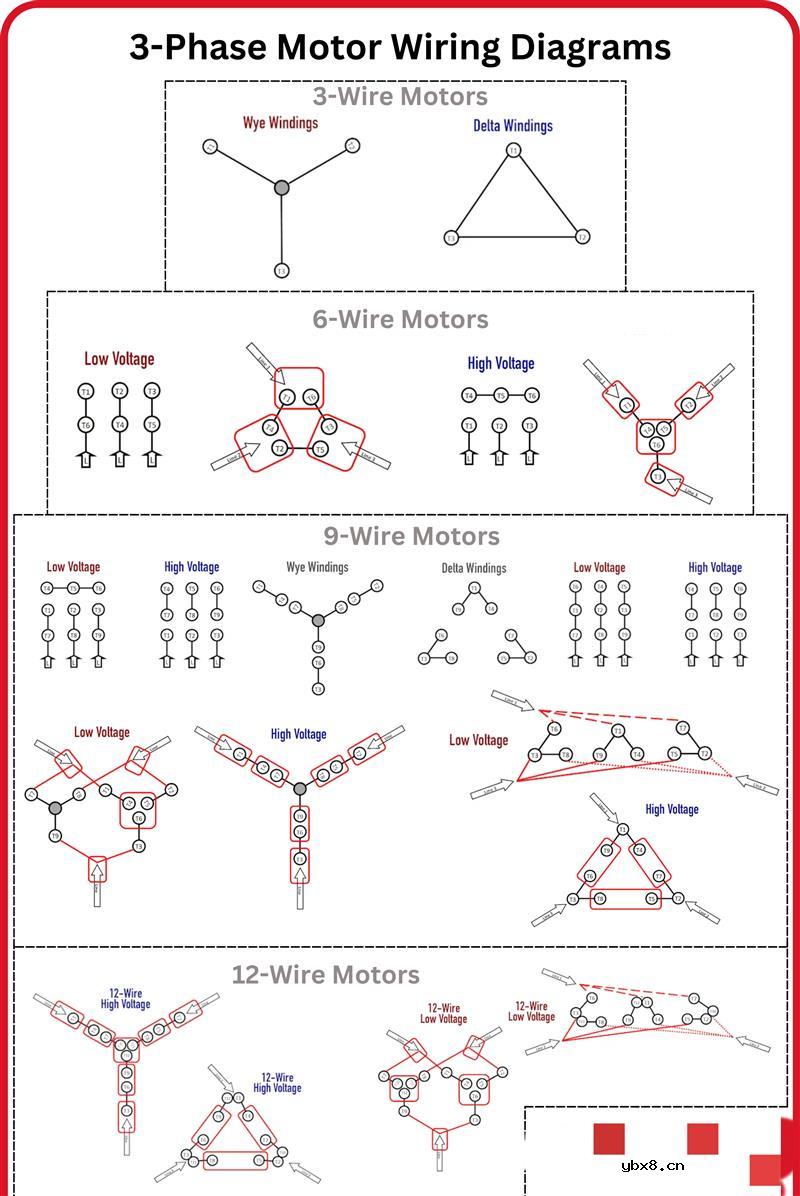 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
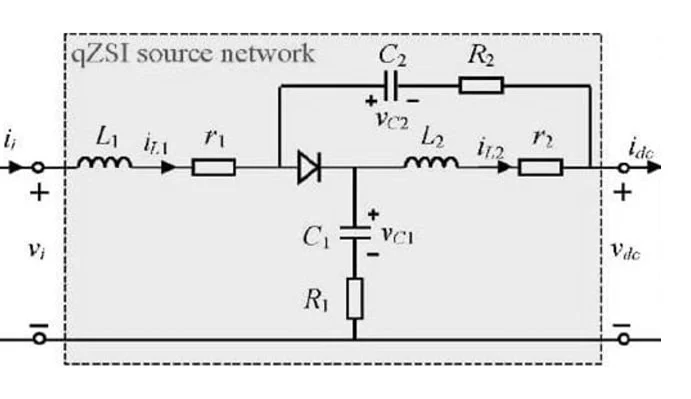 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
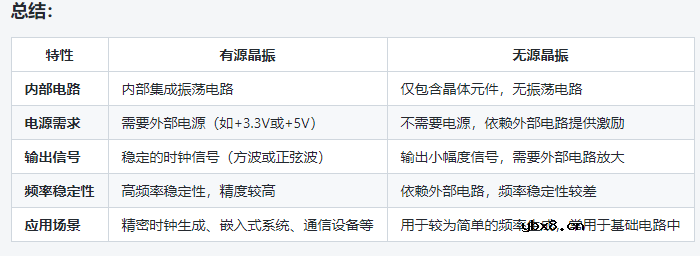 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
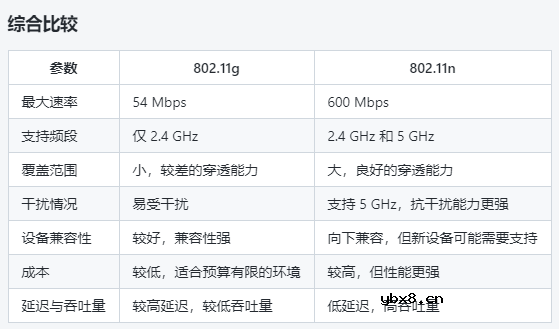 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
电阻的单位
时间:2026-03-05
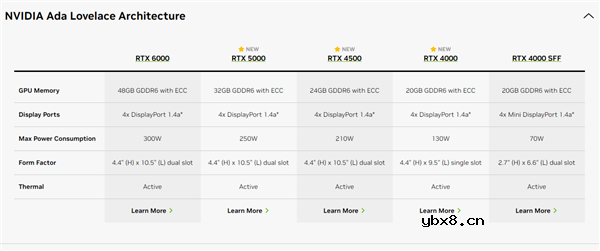 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
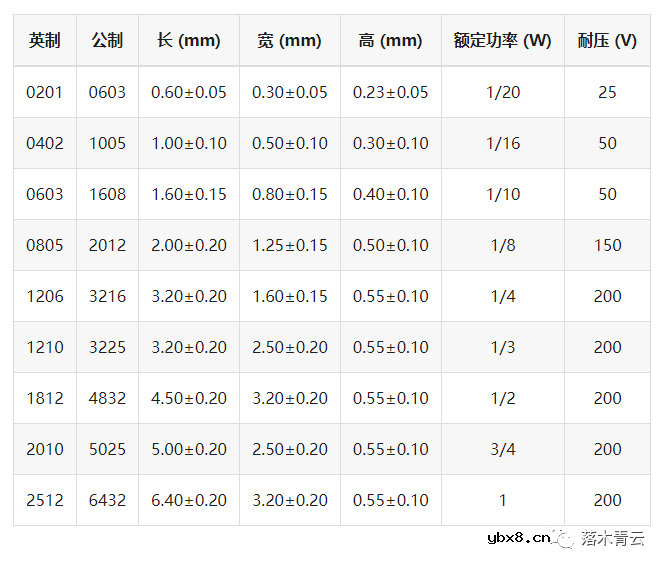
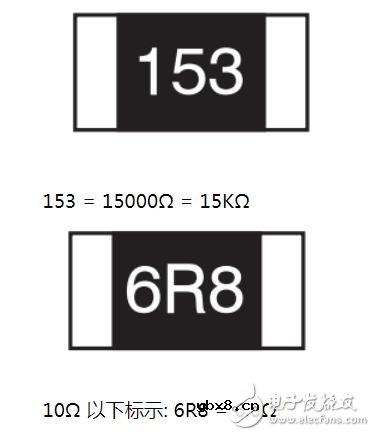 贴片电阻怎么看阻值
贴片电阻怎么看阻值
时间:2026-03-05
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
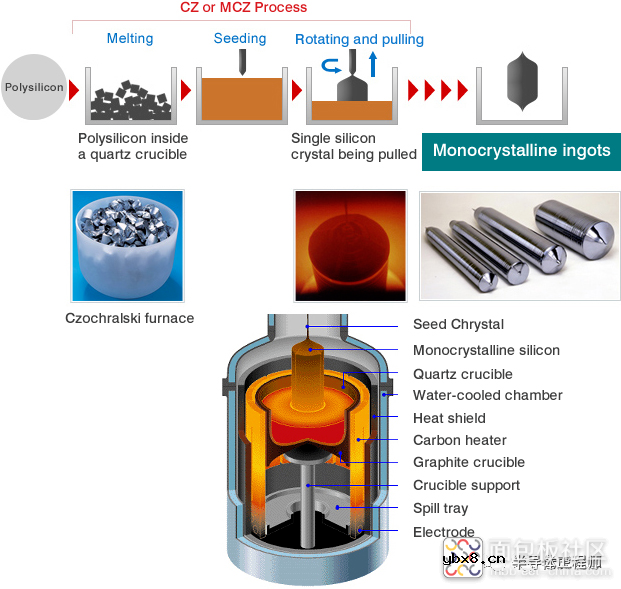 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
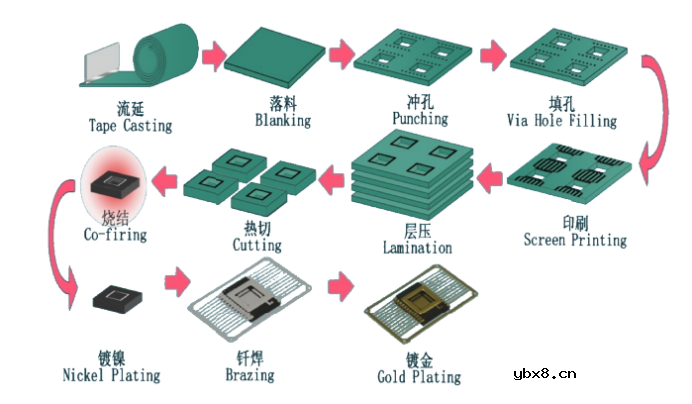 HTCC:半导体封装的理想方式
HTCC:半导体封装的理想方式
时间:2026-03-06
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
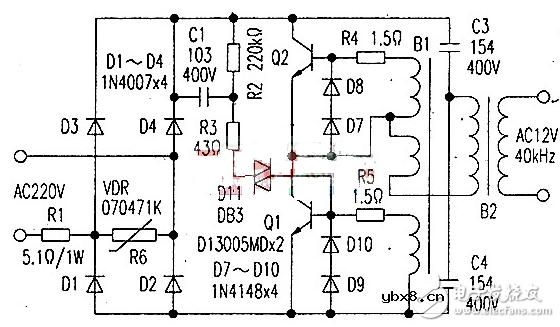 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
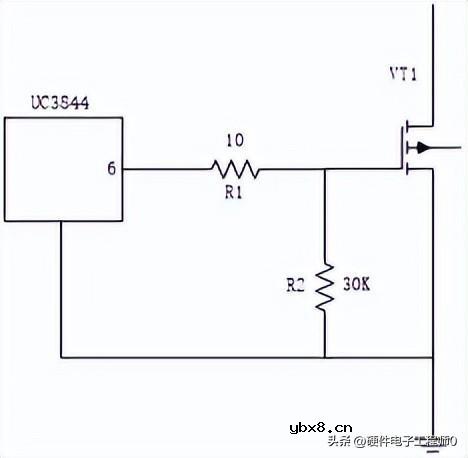 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09