具有非接触式传感功能的柔性传感器的开发仍然是触觉感知的技术挑战。对于传统的非接触式传感,通常使用视觉识别和声学反射检测。视觉识别检测更适合长距离检测,长距离检测受分辨率限制,通常会被短距离内的其他事物遮挡。声反射检测既可以用于短距离检测,也可以用于长距离检测,但发射超声波相对较高的功耗将极大地限制其应用场景。此外,传统的非接触式传感方法通常难以应用于柔性传感器中。
近期,浙江大学机械306实验室陈志坚硕士提出了一种新型的柔性双模态传感器,该传感器具有高灵敏度的接触式压力传感和精确的非接触式距离检测功能,用于智能机器人感知。相关研究成果总结成论文“Highly sensitive and flexible dual-mode sensor with contact and contactless sensing abilities for robotic perception”,发表在国际期刊 Journal of Intelligent Manufacturing 上。论文研究工作得到了国家自然科学基金、东海实验室科学基金、中央高校基础研究基金等项目的资助。

本文所提出的传感器结构如图1所示。柔性传感器上层为3×3的基于电场检测原理的平面叉指电极阵列,用于测量非接触距离信息。下层为4×4的截锥形压力传感单元,用于测量外部接触压力。两种感知单元都通过级联组件和不同的检测单元嵌套布置进行封装,目的是减少不同信号之间的干扰。传感器的工作原理和制造流程如图2和图3所示。


制备的柔性双模态传感器具有0.33V/N的压力检测高灵敏度以及5.5N的压力检测范围,4cm内对绝缘物体和导电物体均具有高灵敏距离检测能力,此外传感器还具有良好的信号稳定性和可重复性,传感器的具体信号测试结果分别如图4和图5所示。


随后将双模态传感器安装在机械臂上,进行物体的抓取和碰撞检测实验,如图6和图7的结果表明,该传感器可以准确测量物体之间的分布接触力和距离,实现全过程的触觉感知,所提出的传感器在机器人操纵和安全工作应用中具有巨大的潜力。


审核编辑:刘清
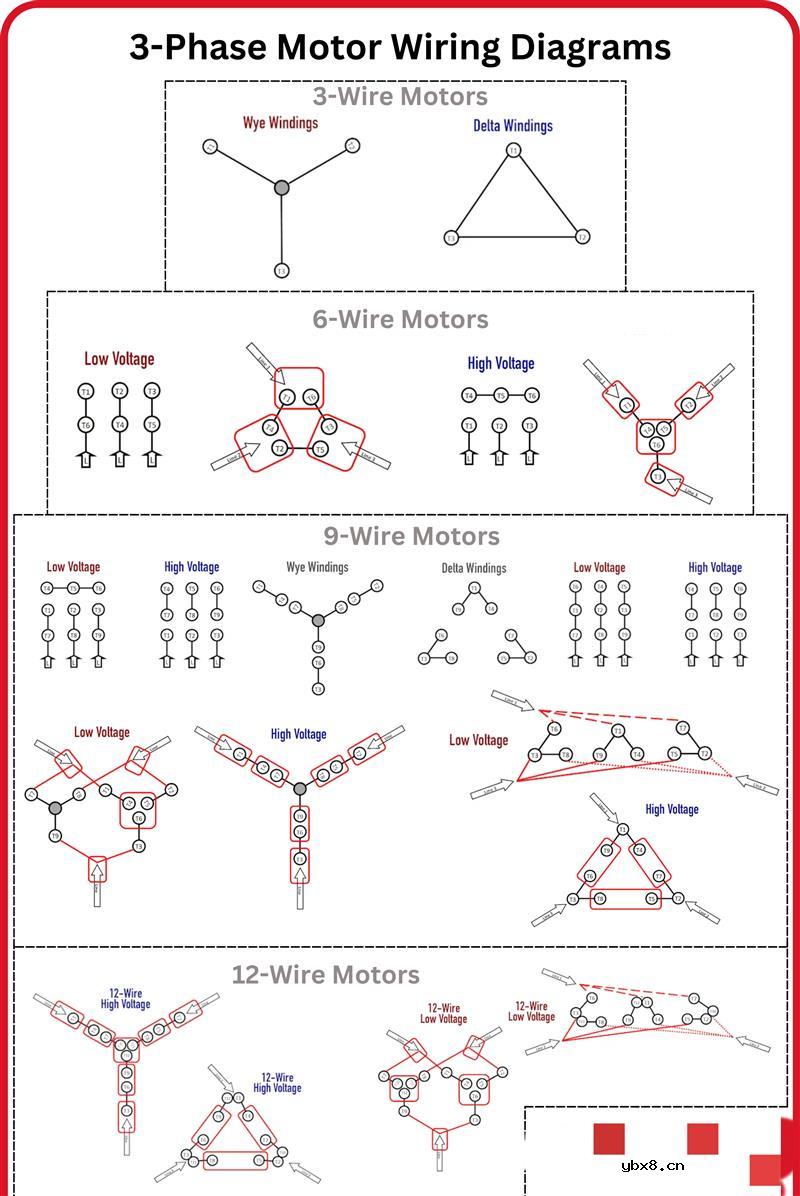 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
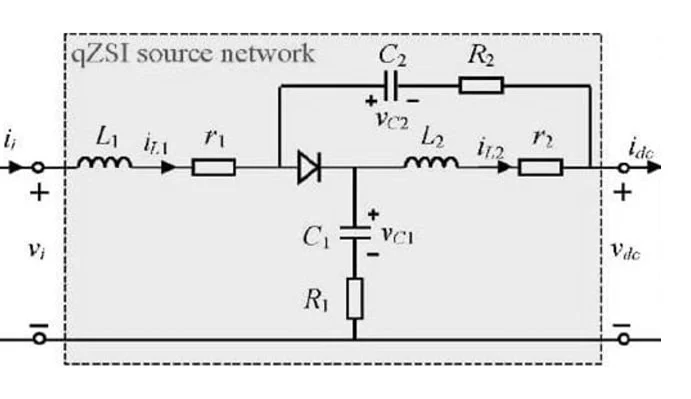 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
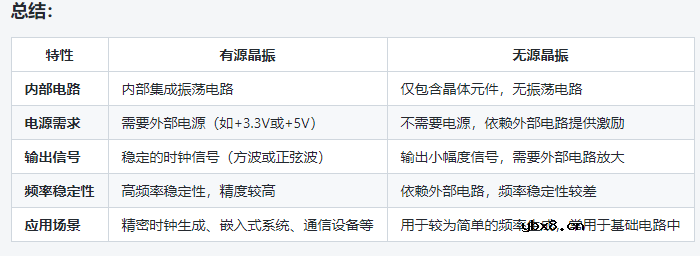 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
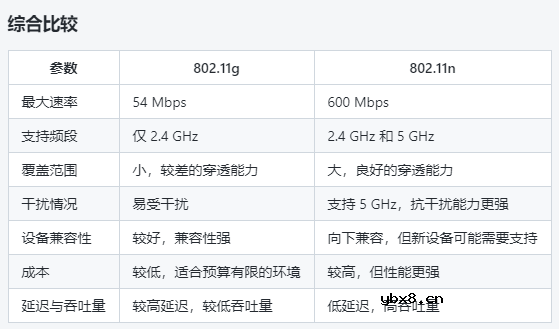 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
电阻的单位
时间:2026-03-05
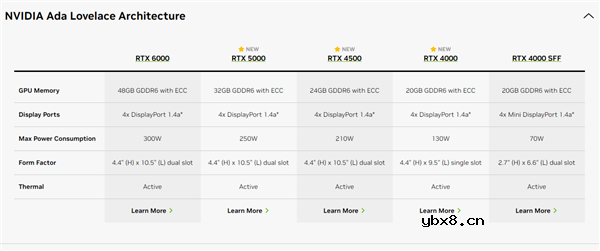 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
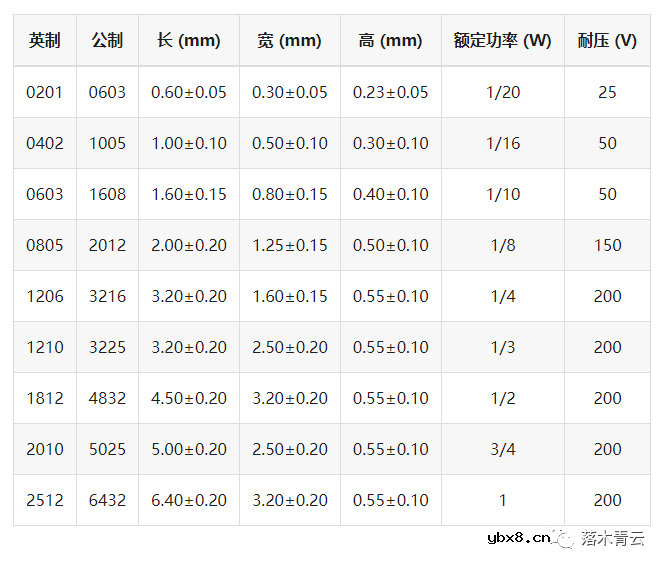
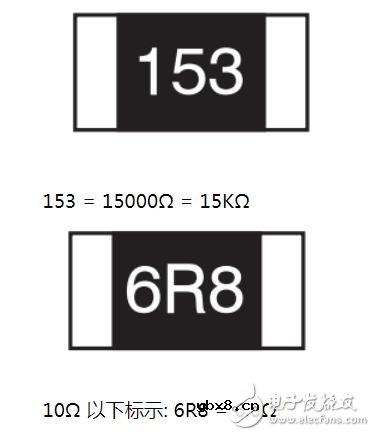 贴片电阻怎么看阻值
贴片电阻怎么看阻值
时间:2026-03-05
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
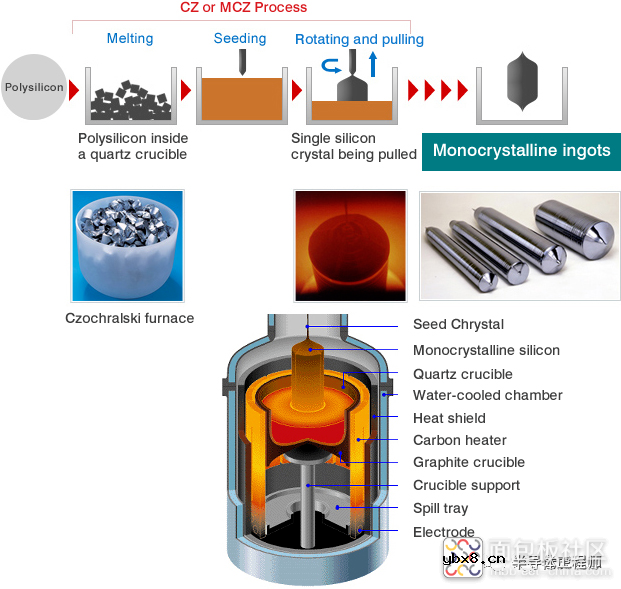 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
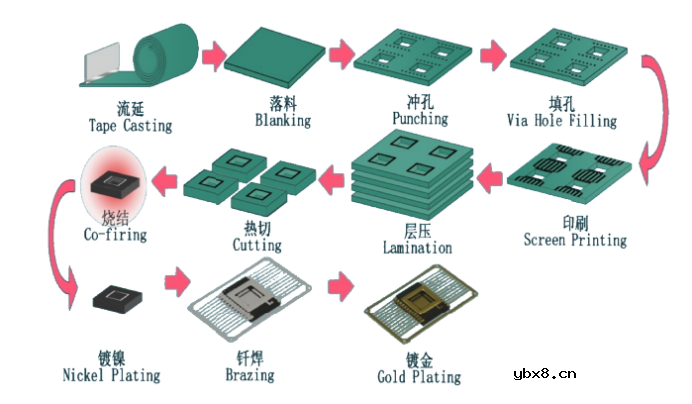 HTCC:半导体封装的理想方式
HTCC:半导体封装的理想方式
时间:2026-03-06
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
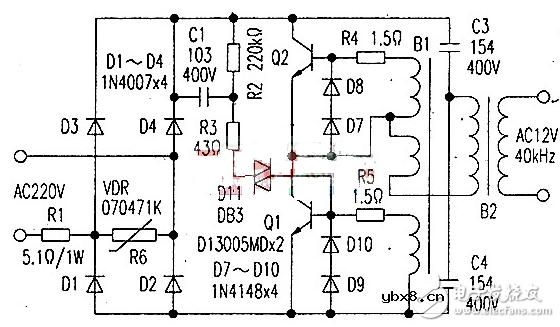 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
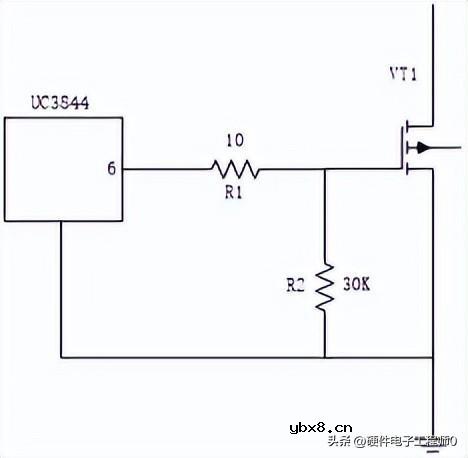 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09