SLAM是Simultaneous Localization and Mapping(同时定位与地图构建)的缩写。它是指在未知环境中,通过机器人自身感知和运动,同时实现自身位置估计(定位)和环境地图构建的过程。
SLAM算法的实现通常涉及以下四个要素:
传感器数据:SLAM依赖于来自机器人传感器的数据,例如激光雷达、摄像头、惯性测量单元(IMU)等。这些传感器收集环境的信息,如距离、角度、速度等,用于构建地图和定位机器人。
运动模型:运动模型描述了机器人如何根据控制输入(如轮速、航向角变化)移动。SLAM算法通过运动模型预测机器人的下一个位置,这种预测与传感器数据结合用于定位。
感知模型:感知模型描述了机器人在当前位置时,预期的传感器数据是什么样子。它帮助算法评估机器人当前位置的可能性,与实际传感器数据进行对比和调整。
数据关联与地图更新:SLAM算法需要解决数据关联问题,即如何将来自不同时间步的传感器数据与地图中的已知位置和特征关联起来。地图更新涉及将新的测量信息整合到现有地图中,保持地图的一致性和性。
相关热词:#SLAM
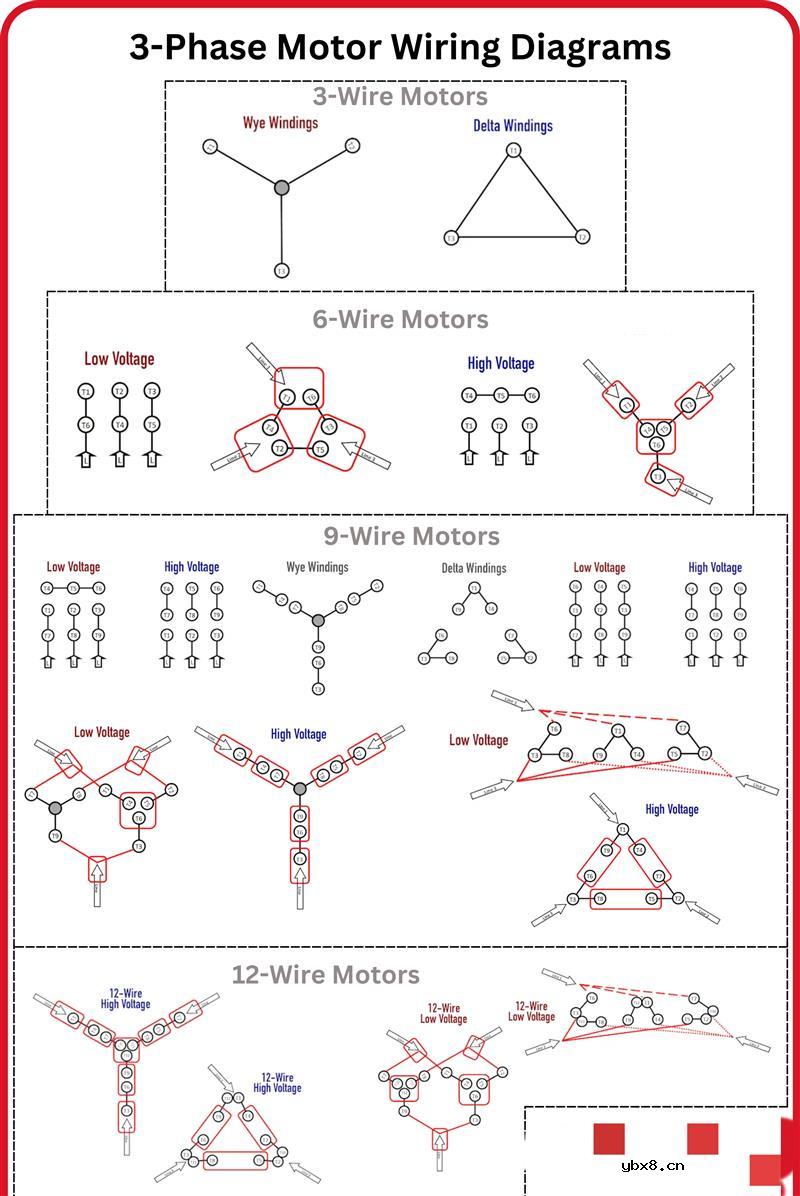 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
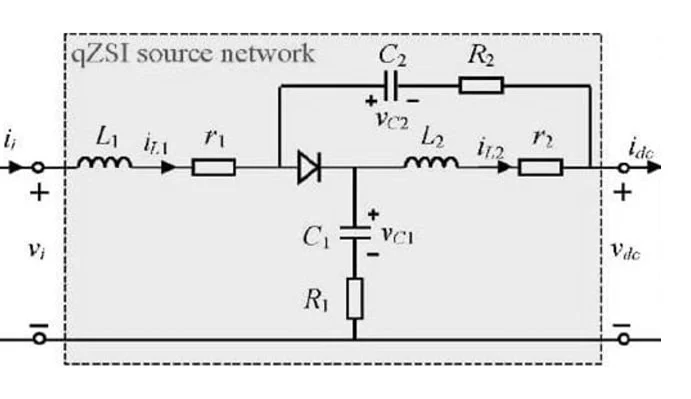 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
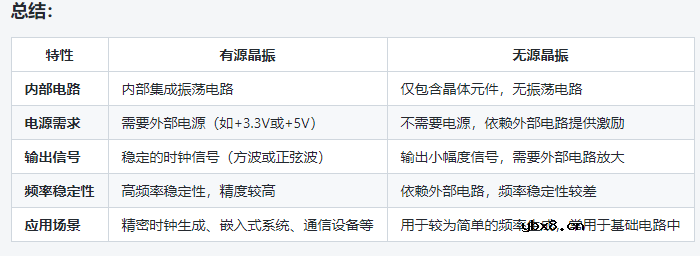 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
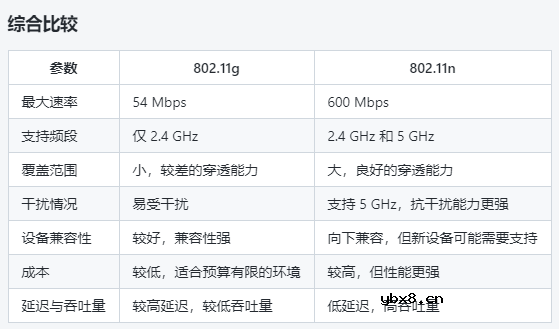 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
什么是追踪缓存/转接卡?
时间:2026-03-06
坐标基准
时间:2026-03-07
GPS接收机的分类
时间:2026-03-07
GPS的WAAS跟踪性能
时间:2026-03-07
什么是GPS旅行提示器/屏幕尺寸
时间:2026-03-07
GPS设备的动态性能
时间:2026-03-07
GPS的接口有哪些类型?
时间:2026-03-07
GPS设备的AV接口
时间:2026-03-07
GPS设备的差分模式
时间:2026-03-07
GPS设备的定位时间
时间:2026-03-07