如今消费者级无人机最大的需求或许正是无人机的避障功能。让无人机按照预先设计好的飞行路径跟随着你这种做法很不错,但是倘若无人机在中途撞上了障碍物,那么这会是一场代价昂贵的教训。
这并不是说自动飞行就会发生事故,无人机操作员也可以像汽车驾驶员那样主动避免事故的发生,只是无人机同样也需要防止事故发生的安全系统。
机器在未来能够学会躲避障碍吗?
避障似乎是真正的智能自动化飞行道路上的一小步。是的,我们想让无人机检测到障碍物时想办法避开它们,但是我们的最终目标是让无人机能够了解周边的环境,并能在飞行时做出调整,就像是专业的飞行员飞行时那样。
目前大疆的精灵4在避障方面处在业界前列,而这家中国无人机巨头的最大竞争对手昊翔也即将发布TyphoonH,这两款无人机都具有避障系统,在飞行时不大可能会直接碰撞到物体。但是大疆精灵4的避障系统有时可能会犯错误。没错,大疆的科技确实可以避免大量的意外事故,但是它在对待旁边以及后方的障碍时容易发生错误,同时它在识别较小的障碍物时容易遇到问题。大疆的避障技术还在进步过程中,目前还无法称为完美。避障同样也是昊翔的TyphoonH可以改进之处。在今年的CES大会演示中TyphoonH装备了英特尔的RealSense,这似乎会是一个更为全面的避障系统,它甚至可以根据移动中的物件做出飞行路线的调整。
昊翔的TyphoonH可以在躲避障碍物方面做得更好。
智能自动化飞行并不遥远
那么避障的下一步发展将会是怎样呢?在不久前我们介绍过Skydio,这家企业正在不断完善一套系统,使无人机可以对周边进行测绘,随后做出智能的选择,这套系统所能做的不仅仅是探测周边的障碍物。Skydio的CEOAdamBry表示他们的无人机所做的不仅仅是躲避障碍,它们会充分利用现有的周边环境信息,随后做出智能的选择,就像是专业飞行员的表现。
目前看来,让机器自主学习将是未来的发展方向,不久之后消费者级无人机将对它们周边的环境有更为全面的了解,它们飞行得越多则能学习到有关周边世界更多的信息。目前这种动态的感知技术由斯坦福大学航天航空系的RossAllen与MarcoPavone开发。他俩最近发表了一篇名为《实时动态规划在无人机避障中的应用》的论文,他们说他们的系统“通过机器学习来探索周边的环境,通过最理想的控制方法来做出决策,在可能的情况下进行事先计算”。
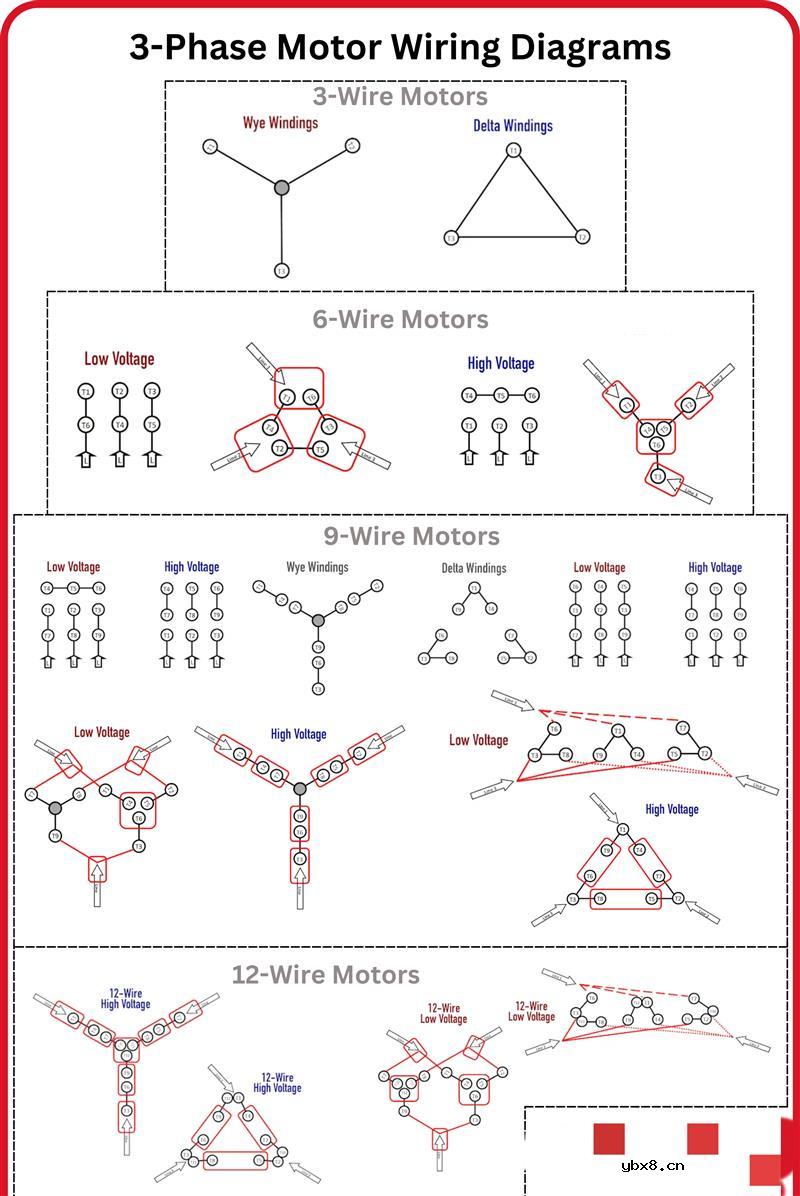 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
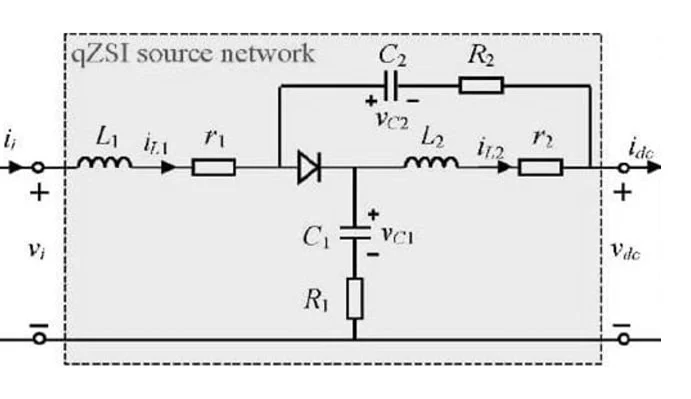 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
 关于阻容吸收器的简单介绍
关于阻容吸收器的简单介绍
时间:2026-07-23
S7-1200和CP343-1的Profinet通信方法
时间:2026-07-23
PDP(等离子显示),PDP是什么意思
时间:2026-07-23
光纤收发器的连接方式和作用
时间:2026-07-22
什么是电磁波?电磁波常见问题
时间:2026-07-22
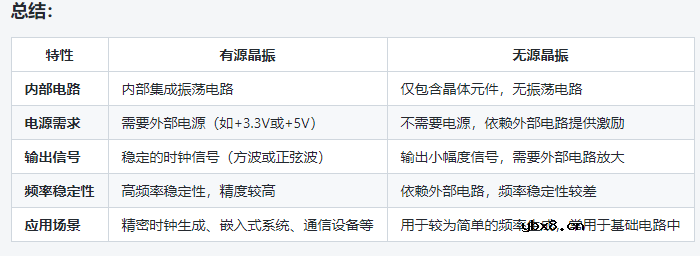 如何区分有源晶振和无源晶振
如何区分有源晶振和无源晶振
时间:2026-07-22
什么是“涡流”以及为什么它们对电机很重要...
时间:2026-07-22
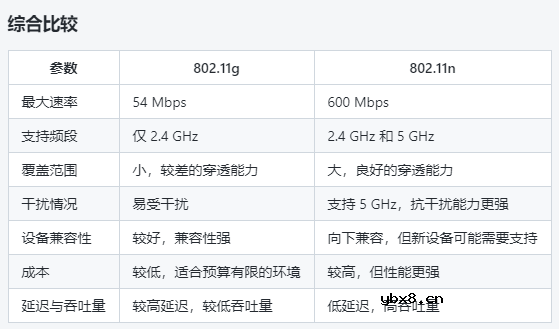 802.11g和802.11n的选择分析
802.11g和802.11n的选择分析
时间:2026-07-21
什么是追踪缓存/转接卡?
时间:2026-03-06
坐标基准
时间:2026-03-07
GPS接收机的分类
时间:2026-03-07
GPS的WAAS跟踪性能
时间:2026-03-07
什么是GPS旅行提示器/屏幕尺寸
时间:2026-03-07
GPS设备的动态性能
时间:2026-03-07
GPS的接口有哪些类型?
时间:2026-03-07
GPS设备的AV接口
时间:2026-03-07
GPS设备的差分模式
时间:2026-03-07
GPS设备的定位时间
时间:2026-03-07