适用版本KUKA 8.3系统
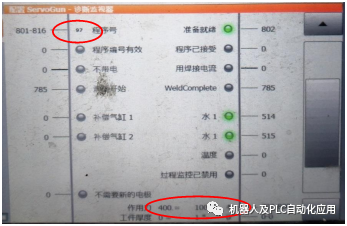
用于电伺服焊钳在调用程序前的自我检查与焊接控制器的通讯,即我给你程序序号调用91焊程序后,焊接控制器给力值400到机器人机器人反馈给焊接控制400的IO信号。用以判断通讯的好坏,数值传输的准确性,起到监控的作用!
接口故障,会触发A789(重置步进触点错误)进行故障复位,重新进行连接,连接后才能进行焊接程序的发出。
下面让我们详细分析一下:
在轨迹预执行中调用,判断通讯连接情况。
在轨迹点处再次进行判断调用。

SG_CheckProgNum_WT[1]:91有效检查程序号
每次焊接都要用到的握手程序91,BOSCH力值是400
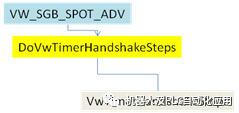
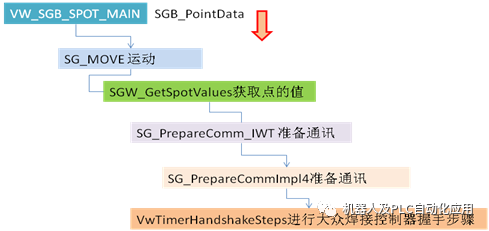
大众焊接控制器握手步骤传送程序号
VwTimerHandshakeSteps(PrepCommStep, Point_DATA, timeOutextension)