二级倒立摆的模糊控制研究
1 引言
在控制理论发展的过程中,某一理论的正确性及实际应用中的可行性都需要一个按其理论设计的控制器控制一个典型对象进行验证。倒立摆就是这样一个被控制对象。倒立摆系统是一个多变量、快速、非线性和自然不稳定系统,在控制过程中该系统能有效反映控制中的许多关键问题,如非线性问题、系统的鲁棒性问题、随动问题、镇定问题及跟踪问题等。倒立摆在控制理论研究中是一种较为理想的实验装置。小车倒立摆系统的控制目标是倒立摆通过小车能够稳定在有限长度的导轨上而不倒下,从而达到动态平衡。本文针对二级倒立摆非线性模型,基于Maminadi模型,通过设计融合函数来设计模糊控制器,有效解决规则爆炸问题,实现二级倒立摆的有效控制。
2 二级倒立摆的数学模型的建立
二级倒立摆由小车、摆杆、水平导轨等组成,小车由伺服电机、皮带轮、传动带带动在水平导轨上左右运动,上下摆可绕各自的转轴在水平导轨所在的铅垂面内自由转动。小车和上下摆杆间通过轴承连接,每个轴承连接处固定有电位器,分别用以检测两根摆杆与铅垂线的角度偏移。小车相对轨道中心点的偏移位置也由固定在皮带轮轴上的电位器检测。
其基本原理为:角度、位置信号经检测电路获取后,再由微分电路得到相应的微分信号,这些信号经A/D转换器转换为数字信号传输至计算机。通过已设计的控制程序计算控制力所需电压值,经D/A转换器转换为模拟信号,功率放大后驱动电机运转,电机再用皮带拖动小车在导轨上往复运动实现对倒立摆的有效控制。忽略空气阻力和各种摩擦,并认为摆杆为刚体。图1为二级倒立摆示意图。
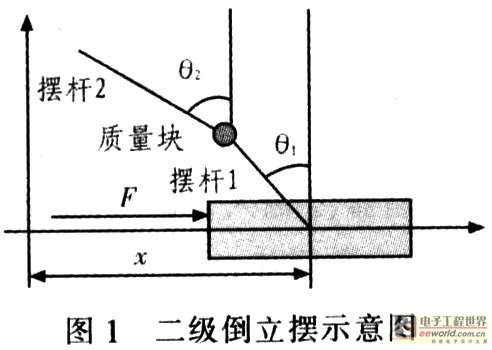
倒立摆参数定义如下:M为小车质量,0.584 kg;m1为摆杆1质量,0.05 kg;m2为摆杆2质量,0.13 kg;m3为摆杆3质量,0.236 kg;l1为摆杆1中心到转动中心的距离,0.077 5 m;l2为摆杆2中心到转动中心的距离,0.25 m;θ1为摆杆1与竖直方向的夹角;θ2为摆杆2与竖直方向的夹角;F为作用在系统上的外力;g为重力加速度,9.8 m/s2。
利用拉格朗日方程推导运动学方程,拉格朗日方程为:
![]()
式中,L为拉格朗日算子,q为系统的广义坐标,T为系统的动能,V为系统的势能。

式中,i=1,2,3…,n,fi为系统在第i个广义坐标上的外力。
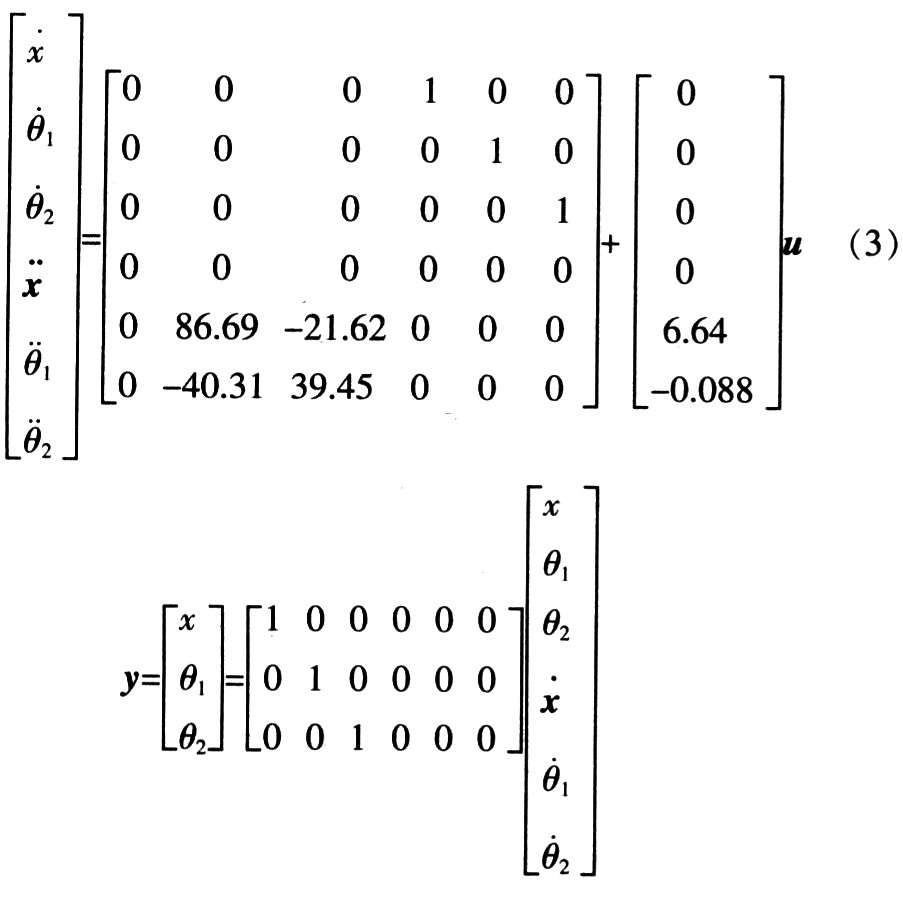
在二级倒立摆系统中,系统的广义坐标有3个,分别为x,θ1,θ2。经计算并线性化并带人参数值得到系统的状态空间方程:
3 二级倒立摆模糊控制系统的设计与仿真
二级倒立摆系统控制目标较多,包括小车位移,下摆摆角,上摆摆角。传统的模糊控制器采用系统误差,误差的导数作为输入,若用传统模糊控制控制二级倒立摆,则模糊控制器有6个输入:小车位移、小车速度、下摆摆角、下摆角速度、上摆摆角和上摆角速度。
若对每个输入变量定义5个模糊子集,控制规则最多有56个,模糊控制规则设计复杂,可调参数非常多,不利于模糊规则的完整制定,这就是在使用模糊控制研究多变量非线性系统时的所谓“规则爆炸(Rule Explosion)”问题。然而,如果用3组二维模糊控制器(2输入1输出)通过串行或并行设计控制器,由于控制器个数增加,大大降低控制实时性,甚至由于不能及时输出当前控制作用力而失控。
3.1 倒立摆控制合成变量
本文是将最优控制理论与模糊控制相结合而采用的一种融合技术。它是把小车的位移、上摆摆角、下摆摆角综合成一个变量E,将小车的速度、上摆的角速度、下摆的角速度综合成一个变量EC,E和EC作为模糊控制器的输入,电压u作为输出,减少模糊控制器的输入,解决规则爆炸的问题,由此设计Mamdani型模糊控制器。
通过LQR仿真,得出输入输出数据对,根据得到的数据计算并制定模糊规则。
对于嵌套函数Y=f2[f1(x)],先使f1(x)对输入变量作初步处理,再利用算法f2(x)根据前级算法的输出进行控制。f1称为融合函数,f2称为作用函数。
首先利用最优控制理论中的LQR求得系统的状态反馈系数K和状态向量x:
![]()
为实现变量融合,分别选取两个反馈系数为控制主元,其他输入变量可根据与主元的相关性和可融合性分别归并到两主元中。对于二级倒立摆,由于摆杆2的控制难度最大,分别选择θ2、θ2为控制主元,相应系数为:kθ=kθ2,kθ=kθ2融合函数的输出向量为: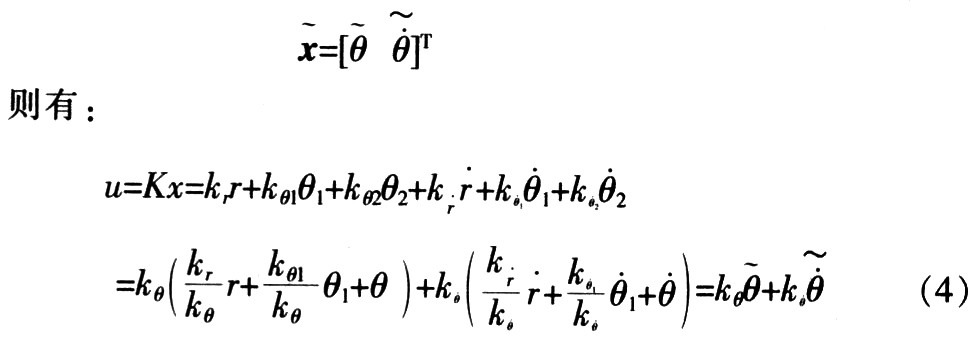
融合函数的输出方程为:

通过把输入状态变量降维,得到角度误差E和角速度误差EC:

通过信息融合,将系统的6个状态变量化为2个状态变量,减少系统的输入,实现模糊控制器的降维。由降维后得到的2个变量E和EC做为模糊控制器的输入,设计一个二维Mamdani型的模糊控制器。利用最优控制求得K。最优控制性能指标函数为:

使式(7)为最小,可求得:
![]()
求解如下RicatTI方程可得到矩阵P:
![]()
性能指标函数中,定义矩阵Q和矩阵R用来平衡系统对输入量和状态量的敏感程度。它们对闭环系统的动态性能影响很大。
在倒立摆系统中,Q,R分别用来对状态向量x和输入控制量u进行平衡加权。一般情况下,P增加时,控制力减小,角度变化变小,跟随速度变慢。而Q中某元素增加时,其对应的状态变量的响应速度也增加,其他状态变量的响应速度相对减慢。为了使得反馈矩阵K更合理,对矩阵Q,R的选取一定要尽量恰当。通过反复测试,实际系统的控制过程选取Q=diag[500 700 700 0 0 0],R=1。
根据二级倒立摆的参数,基于MATLAB强大的矩阵运算及其丰富的内部函数,利用K=lqr(A,B,Q,R)命令计算,可得到状态反馈矩阵K:
![]()

从而得到综合误差E和综合误差变化率EC。
3.2 降维后设计二维Mamdani型模糊控制器
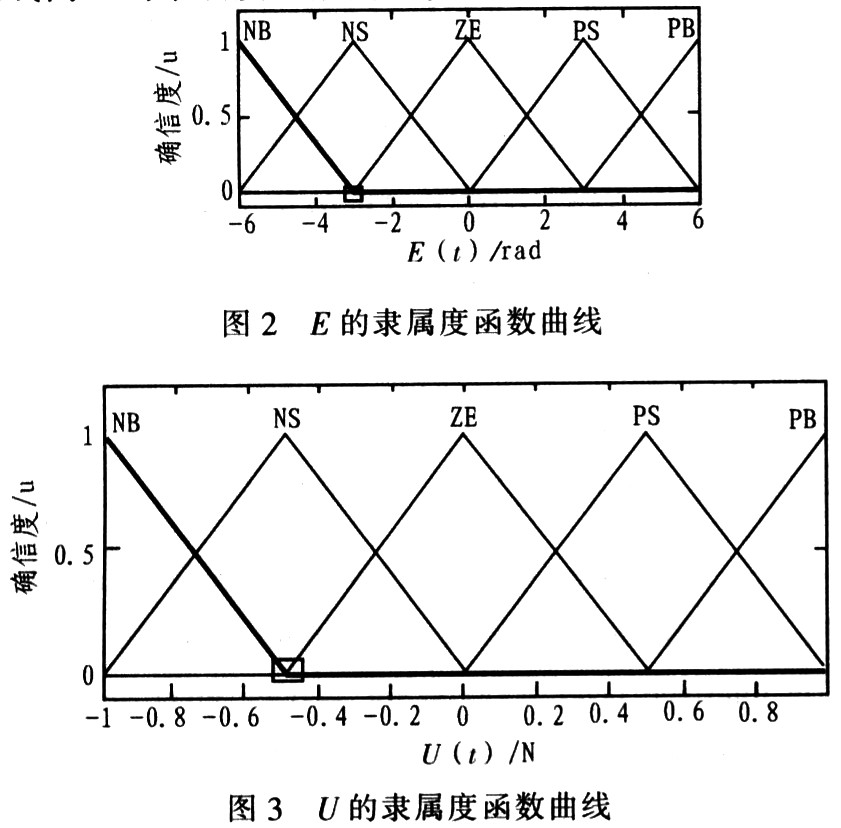
输入变量E、EC,输出变量u;E、EC论域设定:E=[-6,6],EC=[-6,6],输出论域U=[-1,1]均采用三角型、全交迭、均匀分布隶属度函数。每个变量用5个模糊子集{NB NS ZE PS PB}来描述,隶属度函数曲线图如图2、图3所示。EC的隶属度函数曲线同E的隶属度函数曲线。
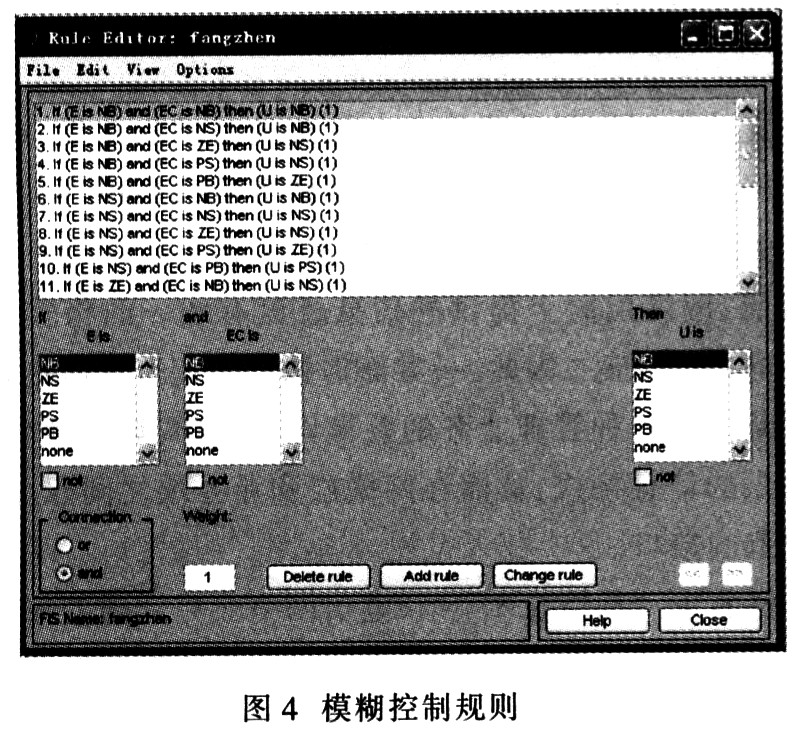
模糊推理采用Mamdani最小运算规则。根据输入、输出论域上的模糊语言变量划分NB(负大),NS(负小),ZE(零),PS(正小),PB(正大),设计模糊推理规则如图4所示。
模糊控制器采用重心法实现非模糊化,与一般采用的最大隶属度法相比较,重心法具有更加平滑的输出推理控制。通过以上分析和试验,并恰当地选择模糊逻辑系统的参数,从而设计一个适合被控对象的模糊控制器,如图5所示。图5中,Ke、Kec为量化因子,Ku为比例因子,State-Space为系统的状态空间方程,SaturaTIon为限幅模块,Scope为示波器模块。根据以上工作,在Simulink环境中对二级倒立摆系统进行仿真,其仿真曲线如图6所示。

4 结束语
二级倒立摆是典型的多输入、非线性、强耦合系统。通过设计融合函数降低控制器的输入维数,用模糊控制解决多输入系统时遇到的模糊规则爆炸问题,使设计的实用模糊控制器成为可能。融合函数的设计方法还可推广应用到一级、三级倒立摆系统中。该模糊控制器设计切实可行,能较好地控制系统,达到较好的控制效果。模糊控制具有鲁棒性和稳定性好、算法简单等特点,应用在实时性要求较高的场合,该控制方法也可应用到其他多变量、非线性系统的控制问题。