引言
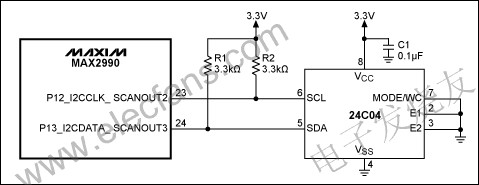
本文介绍了如何通过MAX2990电力线通信调制解调器的I2C接口与外部EEPROM 24C04连接,并给出了相应的固件例程。I²C总线受控于MAX2990 (主机),24C04 EEPROM为从机器件。以下框图给出了本文示例的硬件配置。
固件说明
I²C接口初始化
一旦使能I²C模块,SCL和SDA必须配置成漏极开路状态,以确保I²C总线通信正常。由于I²C是GPIO端口的一个替代功能,固件必须确保SCL和SDA输入在初始化期间禁止上拉(通过对端口控制器的输出位写零实现)。
示例中,时钟频率为250kHz。首先需要配置MAX2990的I²C接口:
PO1_bit.Bit2 = 0; // Disables the GPIO funcTIon of the PO1_bit.Bit3 = 0; // I2C pins I2CCN_bit.I2CEN = 0; // Makes sure that I2C is disabled // to allow the changing of the I2C setTIngs I2CCN_bit.I2CMST = 1; // Sets the I2C engine to master mode I2CCN_bit.I2CEA = 0; // 7-bit address mode I2CCK_bit.I2CCKL = 0x40; // 2µs CLK-low, to define I2C frequency I2CCK_bit.I2CCKH = 0x40; // 2µs CLK-high, to define I2C frequency I2CTO = 200; // I2C_TIMEOUT I2CST = 0x400; // Resets I2C status register I2CCN_bit.I2CEN = 1; // Enables the I2C engine
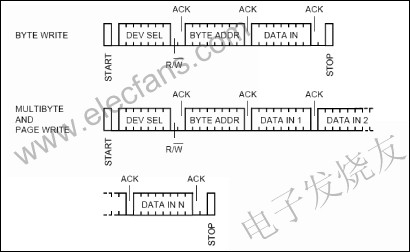
写模式
写入24C04 EEPROM时,必须通过I²C接口写入以下字节:
- EEPROM的I²C总线地址(这里为0xA0)
- EEPROM存储器的地址
- 数据字节(地址将自动递增)
示例中试图写入以下字节,从0x00地址开始,向EEPROM写入:0x12、0x34、0x56、0x78和0x90。
i2c_init_write(); // Sets the MAX2990 I2C Engine into write mode i2c_write(0x50); // 24C04 write (adr = 0b1010 000 0) = 0xA0 // The MAX2990 I2C engine shifts the I2C address by // 1 bit, because it will generate the R/W bit // automaTIcally i2c_write(0x00); // word address location i2c_write(0x12); // data1 i2c_write(0x34); // data2 i2c_write(0x56); // data3 i2c_write(0x78); // data4 i2c_write(0x90); // data5 I2C_STOP; // Sends I2C stop-condition
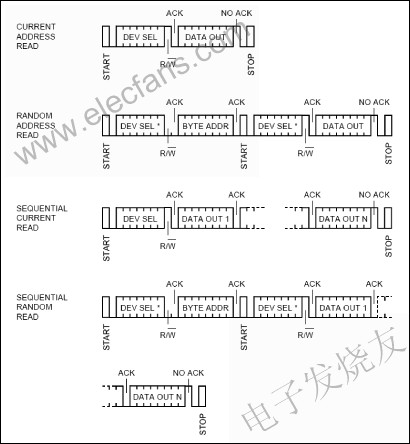
读模式
读取我们写入EEPROM的数据时,为24C04留出足够的写时间非常关键。通常在“停止条件”后留出几个毫秒的时间,请参考数据资料,确认您的时间设置符合IC的要求。
i2c_init_write(); // Sets the MAX2990 I2C engine into write mode i2c_write(0x50); // 24C04 write (adr = 0b1010 000 0) = 0xA0 // The MAX2990 I2C engine shifts the I2C address by // 1 bit, because it will generate the R/W bit // automatically i2c_write(0x00); // word address location i2c_init_read(); // Sets the MAX2990 I2C engine into read mode i2c_write(0x50); // 24C04 read (adr = 0b1010 000 1) = 0xA1 // The MAX2990 I2C engine shifts the I2C address by // 1 bit, because it will generate the R/W bit // automatically unsigned char data[5]; // Array to store the received data i2c_read(data[0]); // Reads 1 byte from I2C and writes it to the array i2c_read(data[1]); // Reads 1 byte from I2C and writes it to the array i2c_read(data[2]); // Reads 1 byte from I2C and writes it to the array i2c_read(data[3]); // Reads 1 byte from I2C and writes it to the array i2c_read(data[4]); // Reads 1 byte from I2C and writes it to the array I2C_STOP; // Sends I2C stop-condition
现在,我们可以验证一下用于EEPROM读、写操作的功能。
i2c_init_write(void) i2c_init_read(void) i2c_write(UINT8 data) i2c_read(UINT8 *data)
void i2c_init_write(void)
{
I2CCN_bit.I2CMODE = 0; // I2C transmit mode
I2CCN_bit.I2CACK = 1; // Creates I2C NACK so that slave can create ACK
I2C_START; // Generates I2C START condition
while( I2CCN_bit.I2CSTART == 1 ); // Waits until the START condition
// was put to the I2C bus
I2CST_bit.I2CSRI = 0; // Resets the I2C interrupt flag
}
int i2c_init_read(void)
{
I2CCN_bit.I2CMODE = 1; // I2C read-mode
I2CCN_bit.I2CACK = 0; // Creates I2C ACK after receive
I2C_START; // Generates I2C START condition
while( I2CCN_bit.I2CSTART == 1 ); // Waits until the START condition
I2CST_bit.I2CSRI = 0; // Resets the I2C interrupt flag
}
void i2c_write(UINT8 data)
{
I2CBUF = data; // Puts the data on the I2C bus
while( I2CST_bit.I2CTXI == 0 ); // Waits for transfer complete
I2CST_bit.I2CTXI = 0; // Resets the I2C transmit complete
// interrupt flag
}
void i2c_read(UINT8 *data)
{
I2CBUF = 0xff; // Puts "all ones" on the I2C bus so that slave can pull
// the bus down to generate zeros
while( !I2CST_bit.I2CRXI ); // Waits for receive complete
I2CST_bit.I2CRXI=0; // Resets the I2C receive complete
// interrupt flag
*data = I2CBUF; // Writes the data to the pointer
}