一种串联谐振逆变器控制方法的探讨
0 引言
本文分析了移相PWM控制串联谐振逆变器的实现。通过改变移相角来调节传送给负载的功率,对功率MOSFET输出电容的影响,提出了一种控制方案以确保功率器件在各种负载条件下实现ZVS,保证全桥拓扑结构中MOSFET的柔性切换,使开关频率紧密地跟随谐振频率,使逆变器工作在功率因数接近1的准谐振状态。
1 移相控制串联谐振逆变器工作原理
全桥架构的串联谐振逆变器如图1所示。4个开关管S1~S4,分别以50%的占空比开通,其中S1及S4为基准臂开关,S2及S3为移相臂开关,每个桥臂上的功率管以180°的相位差开通与关断,两个桥臂开关的驱动信号之间相差一个相位角φ,控制时序如图2所示。使输出的正负交替电压之间插入一个箝位到零点的电压值,这样只要改变相位角φ就可以相应改变输出电压的有效值,最终达到调节输出功率的目的。当采用移相调功方法时,电路的工作频率变化较小,具有良好的负载适应性。特别是当负载阻抗具有较高品质因数时,其调功范围内频率变化更小[1]。
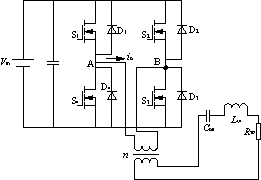
图1 串联谐振逆变器主电路
当工作频率在谐振频率之上,即负载呈现感性状态,负载电流io落后于准方波电压vAB,如图2所示。要实现功率管的零电压开通,必须要有足够的能量用来抽走将要开通的开关管的输出电容上的电荷;并给同一桥臂要关断的开关管的结电容充电。开关管输出电容放电结束后二极管续流,此时给出驱动信号,开关管将在零电压状态开通。如果开关频率紧跟谐振点频率保持恒定,由于φ角的增大,负载电流在S3开通前变成正相,ZVS将不能实现。为了防止失去ZVS状态,应确保开关管输出电容的完全放电,所以控制器需要提高开关频率,在S3开通前去获得更大的负相负载电流。本系统利用了电路上的寄生元件,使得全桥架构中的4个开关器件都能运行于零电压切换,不仅降低了切换损失与开关应力,也不象硬开关PWM那样需要采用缓冲吸收电路[2]。
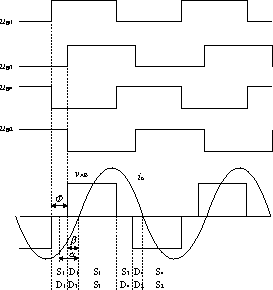
图2 工作波形
2 移相控制串联谐振逆变器的分析
系统的全桥架构等效电路如图3所示。由图3可知下列关系的存在:
负载因数Q=![]() ;
;
特征阻抗Zo=![]() ;
;
谐振频率ω0=![]() ;
;
频率标么值ωn=![]() (ωs为开关频率)。
(ωs为开关频率)。
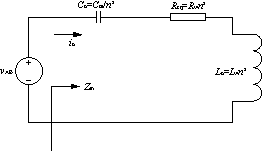
图3 等效电路
准方波电压vAB,近似正弦波的负载电流io。当工作在谐振点之上,可获得ZVS,槽路电流以一定的相位α落后于槽路电压,如图2所示。相位滞后可表示为
α=arg(Zin)=arctan![]() (1)
(1)
式中:Zin为输入阻抗。
在槽路电压为正,槽路电流为负的时刻,相差β是决定ZVS实现的基本要素。获得ZVS的βmin的数学表达式可以从以下电量分析中得到:槽路电流必须足够大,能使储存在S3的能量qcoss释放,且在β范围内提供给S4能量,应当注意qcoss也是Vin储存在输出电容Coss中的能量。根据这些电量之间的联系,βmin可由式(2)得到[3]。
βmin=arccos![]() (2)
(2)
式中:Ip为负载峰值电流。
所以实现ZVS所需的频率是一个输出电容电量与满载电流之间的函数;可获得在失去ZVS状态前所允许的最大相移,如式(3)所示。
φmax=2(α-βmin)(3)
图4给出了针对不同负载值关于频率标么值ωn的几条φmax曲线。
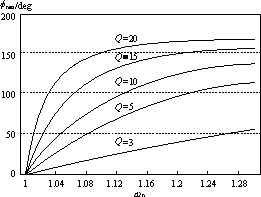
图4 不同负载下φmax与ωn的关系曲线
该曲线展示了假如使用理想开关器件Coss=0,即βmin=0时,对ZVS来讲所允许的最大相移。但对实际应用来讲,βmin大于零,φmax小于理想状况。通过计算传送给等效阻抗的功率可以得到输出功率的表达式为
Pout=![]() Req(4)
Req(4)
标称输出频率表达式为
Pn=Pout![]() (5)
(5)
式(4)与式(5)联立得
Pn=![]() Qcos2αcos2
Qcos2αcos2![]() (6)
(6)
对功率调节而言,Q值的大小与所允许的最大相移大小相对应。倘若期望的输出功率由给定的功率要求所限定,为保证功率的恒定,在低Q值下工作时,所需的相移角就可能比φmax大,这样将会失去ZVS状态。为减小βmin,增大φmax,应使环流能量尽量小,所以,开关频率应尽可能接近谐振频率,在保证ZVS条件下,可以通过工作在比谐振频率略高的频率级别,即通过使负载工作在感性条件下来解决。
3 控制目标及策略
本系统的控制目标是,调节输出功率,并在各种负载条件下保持ZVS。
对功率调节来讲,如果对于各种负载条件下,βmin已知,一种利用开关频率和移相的调功方法可以用式(1)、式(2)、式(3)和式(6)迭代后获得。因此,本文提出了一种确保在各种负载条件下实现ZVS的控制策略,包含3种简化控制实现的选择,即固定β相位控制;固定β时间控制与随峰值电流补偿β时间控制。
最简单的实现方法是为适合于最坏的负载状况,即调节β为一个恒定的相位值βfixed。βfixed是保证ZVS状况下,对负载变化范围中所需要的βmin的最大值,它可以通过式(2)获得。在保证ZVS的最低Q值处将产生βmin的最大值,因为,此时槽路电流最小。给定Pn,Q和βfixed,可通过式(1)、式(3)和式(6)迭代获得ωn和φ。所选择的Pn值应当是对于负载变化范围中的最大值,从而减小环流能量损失。较大的Pn值意味着开关频率将紧随谐振点频率和较大的Zo。但这将导致大的开通率,并减小了次级电容峰值电压,从而允许低电压等级的次级电容的应用。
分析表明,固定β时间的调节较之固定β相位调节只是稍稍改善了逆变器的功率因数。对于固定相位控制来讲,α只是比固定时间控制略大。随着负载参数的增大,对固定相位控制来讲tβ增大,然而对于固定时间控制,tβ和预期一样保持恒量。因此,固定时间控制对于tβ是理想的,即tβfixed=βfixed/ωn。把归一化时间转化为实际的时间时,tβ需要乘以![]() 。选择一个较高的Pn是为了得到更高的归一化频率。因为逆变器将进一步地工作在谐振点附近。在这种状态下的控制策略将确保ZVS。
。选择一个较高的Pn是为了得到更高的归一化频率。因为逆变器将进一步地工作在谐振点附近。在这种状态下的控制策略将确保ZVS。
在此,我们选择随峰值电流补偿β时间控制的方式。tβ不再被一个固定的时间值而是由变化的时间策略所控制。在这种实现方式下,随着Q值的增大,槽路峰值电流Ip会随之增大。对于更高的峰值电流tβ可能会减小,这个与负载峰值电流有联系的β可由式(2)体现。一个控制系统应能实现随着负载峰值电流的增大而自动减小tβfixed的初始值。控制根据式(7)来实现。
tβ=tβfixed-KIp(7)
式中:Ip为峰值电流;
K为最理想增益。
图5表示,当固定Q值时,采用峰值电流补偿控制,与固定时间或固定相位控制方法相比较,功率因数有了进一步的提高(α相对小)。
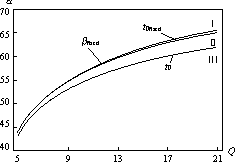
图5 采用不同控制时
4 结语
本文阐明了一种控制策略,提出了在各种负载条件下获得ZVS的实现方法。通过改变移相角进行输出功率的调节,改变开关频率去确保ZVS状态。设计者可以依据负载的不同要求及不同的应用场合采用该控制方法。