设计原理
随着各种高新前沿技术的迅猛发展,传统设计的固定延迟时间的快前沿脉冲源,已不能满足需要,常常需要在一定范围内可对延迟时间进行任意设置。
???? 一般讲来常规的设计有两种方法。一是将多个具有不同延迟时间的固定延迟脉冲产生电路单元,组合成一个可程控的电路,通过计算机的控制来获得不同延迟时间的快沿脉冲输出,但很难达到高准确度的延迟时间和较好的快沿特性以及较高的脉冲形状的一致性。主要原因是在多个固定延迟单元电路的接入点处,不管是电子式还是机械式开关,其接触电阻都是一个随机参数,并且该参数还受到电路周围环境的影响,从而使输出的脉冲前沿和延迟时间产生较大的随机误差,并且很难消除。而且采用这种方法所设计的电路复杂、体积也较大。
?????? 二是制作一个具有较长延迟时间的脉冲产生电路,在电路的不同延迟时间部位处引出具有不同延迟时间的信号,再由计算机根据用户的需求,将所需延迟时间的脉冲接入后续的输出放大电路,以获得所需的信号。这种设计方法仍然存在前一种设计方法中相同的问题,而且对工艺提出了更高的要求。传统方法的电路是用分离元件构成和传统工艺制作,要获得纳秒级延迟时间的脉冲是十分困难的。
DALLAS公司的DS1023S可编程延迟线芯片既具有长延迟的快沿脉冲延迟电路的各种性能,又具有与计算机通讯和接受控制的特性,采用这种芯片,可以设计出高准确度可程控延迟快沿脉冲信号源。
系统原理及组成
本脉冲信号源主要由纳秒级延迟脉冲产生放大输出电路、微秒级延迟脉冲产生放大输出电路以及系统控制电路三部分组成。纳秒级延迟脉冲产生放大输出电路和微秒级延迟脉冲产生放大输出电路是两个完全独立的电路,它们可以同时使用。纳秒级和微秒级的延迟时间均可以通过键盘进行设置,并通过各自的显示器进行显示。高准确度可程控延迟快前沿脉冲信号源原理框图如图1所示。

纳秒级延迟脉冲产生放大输出电路
纳秒级延迟脉冲产生放大输出电路由触发脉冲整形电路、纳秒级参考和延迟脉冲形成电路,以及参考与延迟脉冲输出放大电路组成。
触发脉冲整形电路完成对由外触发输入端送入的±(5~25)V脉冲信号的整形锁定,形成一个具有一定前沿和宽度的规则脉冲送入纳秒级参考和延迟脉冲形成电路的输入端。原理如图2所示。

纳秒级参考和延迟脉冲形成电路产生参考脉冲和延迟时间在0~250ns步进为1ns的延迟脉冲,由DS1023S构成。DS1023S是一个8位可编程延迟芯片,延迟时间可由计算机通过并行方式或串行方式进行编程控制。由于系统控制相对简单,故选用实时功能较强的单片机97C2051作为系统的中心处理器。DS1023S与97C2051单片机接口如图3所示。为了获得高准确度的延迟,采用DS1023S提供的延迟参考输出功能,可以最大限度的减少当输入信号电平发生变化时,输入到输出间的测量延迟时间将会因过渡时间的变化而发生的显著改变,同时还可消除零步长延迟时因工作温度系数变化而引起的不利影响。DS1023-100设置于并行编程工作方式,所需的设置数据由总线驱动器74HC244送74HC573锁存后输出到DS1023S的并口输入端,DS1023S根据并口输入端的数据对输入脉冲进行延迟。DS1023S的REF/PWM和OUT/OUT端分别产生出纳秒级的参考输出脉冲和纳秒级的延迟输出脉冲,经驱动后送输出放大电路。

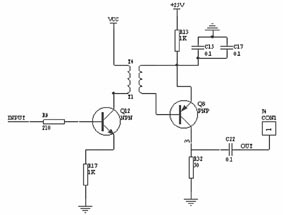
参考脉冲与延迟脉冲输出放大电路是一个脉冲变压器藕合的脉冲放大器,主要完成对参考脉冲和延迟脉冲进行整形放大的功能,电路如图4所示。由前级脉冲产生电路产生的参考和延迟脉冲经过本电路的整形和放大后,各自输出一个幅度为25V、脉宽为200ns、上升时间为4.5ns的脉冲。
微秒级参考和延迟脉冲产生放大输出电路
微秒级参考和延迟脉冲产生放大输出电路主要由触发脉冲整形电路、参考脉冲产生电路、10MHz时钟产生器、延迟脉冲产生电路和参考脉冲与延迟脉冲放大输出等电路组成。延迟时间可在0~999μs范围内设置,最小步进为1μs,原理见图5。

触发脉冲整形电路与纳秒级的触发脉冲整形电路相同。
参考脉冲产生电路由一个D触发器构成。当触发脉冲到来时,它直接产生出所需的参考脉冲,该脉冲除了作为参考脉冲信号外,还作为延迟脉冲产生电路的触发信号。
10MHz时钟产生器是为了给延迟脉冲产生电路提供计算延迟时间的1μs标准时钟而设计的。
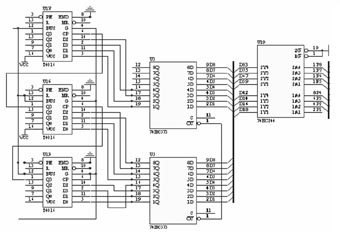
延迟脉冲产生电路由三个T4016可编程十进制计数器构成。当作为触发信号的参考脉冲到来时计数器就开始计数。计数器以标准的1μs时钟作为计数单位。当计数结束后,立即产生一个延迟脉冲。微秒级延迟脉冲延迟时间的设置是通过系统控制电路向可编程三位十进制计数器电路写入计数值来实现的。可编程十进制计数器与系统接口连线如图6所示。
参考脉冲与延迟脉冲放大电路主要由二级脉冲放大器和一级跟随器组成。参考脉冲与延迟脉冲经过进一步的整形放大后,可实现上升时间为2μs、幅度为25V、宽度为200μs的技术指标。
系统控制电路
系统控制电路主要由单片机97C2051、总线驱动器74HC244、数据锁存器74HC273、74HC573和6个7段LED显示器组成,完成延迟数据的设置和显示等功能。数据传送和数据处理由控制软件来完成。
系统控制软件
系统控制软件由主程序、键盘扫描程序、显示程序、延迟时间补偿程序等子程序组成,主程序流程图如图7所示。

主程序完成系统的初始化和资源分配,以及各子程序的调用;键盘扫描子程序产生键盘扫描信号并进行键值识别计算;显示子程序完成延迟值的循环显示;延迟时间补偿子程序主要是针对纳秒级参考与延迟脉冲的,根据系统硬件调试结果对零延迟进行补偿,以进一步提高延迟时间准确度。
结束语
该系统由于使用了先进的可编程延迟芯片,电路结构简单,延迟时间可任意设置,延迟准确度高,抗干扰能力强。另外由于采用单片机作为控制部件,使该仪器操作简单方便,功能更易扩展。