摘 要:本文采用LOG101对数放大器来实现对数比测量系统。
BMP测量
加速器束流测量系统是加速器调试和运行的重要诊断手段,利用束流测量系统进行各种束流参数的测量为机器研究和完善提供了重要依据,人们常称之为加速器的“眼睛”。主要的测量有:束流位置测量(BPM)、工作点测量、束团长度测量、束流流强测量等。其中束流位置是加速器的重要参数之一,测量束流位置的最基本的方法是耦合出束流的电磁场。由于束流是一个电流,所以它产生电场和磁场。在高能束流的情况下,这些场是纯横电磁场(TEM)。如果束流偏离真空室中心,则耦合出束流的电磁场将被调制,由此可以得到束流位置信息。
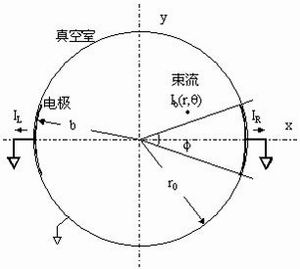
图1 具有束流的束流位置检测器和真空室示意图
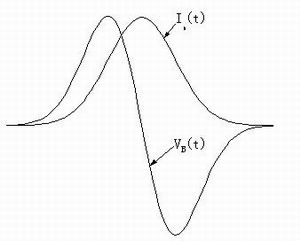
图2 钮扣电极的感应电压波形
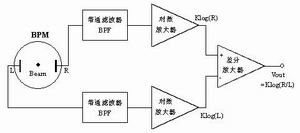
图3 对数比处理电路的方框图
通常,人们采用探测电极测量束流的电磁场。探测电极的感应信号是被束流调制的时域信号,其载波是束团的回旋频率(对单束团而言)或高频的RF频率(对多束团而言)。传统的束流位置探测电极是一对电极或两对电极(在同时测量水平和垂直位置时)。
图1为具有束流的束流位置检测器和真空室示意图。为了分析方便,我们采用极坐标表示。这里,表示电极上某点的位置,表示束流的位置, 为真空室半径,b为电极到真空室中心的距离,为张角。
在b接近时,采用静电镜象法可求解得电极上的壁电流密度为:
将上式展开可得:
对于左右放置的两个电极,其电流分别为:
如果用差比和(D/S)表示,则
+高次项
其位置灵敏度为:
如果用对数比表示,则高次项
由上面公式,通过BPM对数电子学,就可以计算出束流位置。
设计
从安装在真空管道内的四个纽扣电极感应出的信号的波形如图2所示。
这个信号的脉宽很小,为ns数量级,其频谱很宽,能达到几个GHz。
整个设计的方框图如图3所示。
这里所显示的只是一个方向的位置测量。BPM需要测量两个方向的位置,即水平和垂直方向的位置,两个方向的电路结构是完全一样的。
在对数比方法中,对数比电路的输出为:
在此用TI公司的对数放大器LOG101来实现。LOG101具有高精度(0.01% FSO Over 5 Decades),宽动态范围(100pA~3.5mA),低静态电流(1mA),宽供电范围(±4.5V~±18V)等特点。因为束流可能会工作在低流强,高流强情况下,所以要求宽的动态范围,当然精度也是越高越好。
这里将从BPM来的R信号送入LOG101的1引脚,作为I1,L信号送入8引脚,作为I2,加上一些附加电路,就可实现对数运算了。
系统标定
为了测量束流的绝对位置,必须知道BPM的四个电极的电中心与BPM的机械几何中心的关系。因此,在把BPM 安装在加速器的真空管道上前,必须对每个BPM 进行标定,以得到BPM上的电压值与位置之间的对应关系。
图4示出束流位置监测器标定系统的结构图。
根据各电极感应信号的幅度,可由下式计算电子学归一化水平和垂直位置信号:
通过一定范围内移动天线或拉直丝模拟束流位置移动(X,Y),并根据测量的信号电极(V1, V2, V3, V4)计算出水平和垂直位置信号(U,V)值,这样可以得到BPM的Mapping图。
图5示出束流位置监测器标定系统得到的BPM的Mapping图。
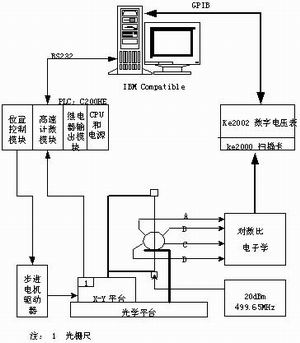
图4 束流位置监测器标定系统的结构图
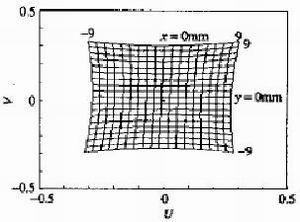
图5 BPM的Mapping图
根据Mapping数据,采用多项式拟合,就可以得到机械位置(X,Y)与电子学归一化位置信号(U,V)的关系式。下面给出4次多项式的公式:
其中,A0,0和B0,0分别表示电中心与机械中心的偏差;A1,0和B0,1分别为增益系数。
结语
BPM是加速器束流测量中的重要一项,并直接影响到其他一些物理量的测量,由于对数比方法的种种优点,使它的应用很广泛。这里就是用TI的LOG101对数放大器来实现对数比方法的。