引言
海上搜救服务是国家应急救援体系的重要组成部分,也是国家经济发展的重要保障。采用先进的搜索系统是提高搜救行动有效性的重要手段之一。通常情况下搜索系统采用雷达或者光电成像系统,因为光图像传感器具有很高的分辨率,在能见度理想的情况下,观测距离可达20~40km,但它的缺点就是在较大程度上依赖良好的天气及日照条件。而红外图像传感器具有穿透烟、雾、霾、雪等能力,可弥补这一不足,因此采用红外、可见光成像和DSP图像处理系统构成的光电搜索系统。
根据海洋搜救的性质,该系统应具备以下基本能力:
较高的可疑目标检测能力;
较高的海洋背景抗干扰能力;
具有一定的目标识别和跟踪能力。
基于以上考虑,本文设计了由二片TMS320F2812和八片TMS320C6416T构成的图像处理系统。
系统指标要求
可见光视频输入:CCIR/EIA或PAL/NTSC视频信号
红外视频输入:CCIR/EIA
视频输出:VGA或标准视频输出
视频AD转换精度:12bit
视频显示DA转换精度:10bit
图像处理帧速率:大于30Hz
可检测“目标”的最小象素数:3×3
系统方案
系统框图如图1所示。
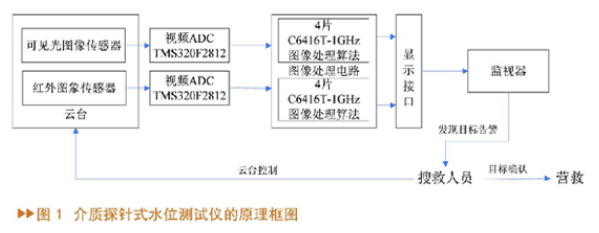
采用TMS320F2812实现视频采集,通过XINTF接口与多片6416-HPI接口连接,实现图像数据传输。各6416采取流水工作模式,通过EMIFB接口输出处理后的图像数据,经过显示电路,由监视器显示输出图像。
系统采用可拓展结构,可根据实际需要确定6416图像处理单元数目。通常采用四个或八个6416图像处理单元。
系统软件对图像数据进行滤波和边缘检测,检测可疑目标并进行识别。
单视频输入时,可选择四个或八个6416图像处理单元构成图像处理机 。
双视频输入工作时序图如图2所示。每个视频通道拥有四个6416图像处理单元,分别采用流水工作模式,每片6416处理一幅图像的最大周期为4帧,两组的处理结果输出给图像显示模块处理。
系统硬件设计
硬件系统由三部分组成:视频采集电路、图像处理电路及显示电路。硬件设计总体框图如图3所示。

视频采集电路
基于2812-DSP的视频信号采集原理框图如图4所示,其中包括视频预处理模块和2812 模块。视频预处理模块包括Y/C分离、电平钳位、同步分离、幅度调整处理电路。2812-DSP片上A/D以12.5M的速度采集视频信号,达到了极限采样速率(采样间隔时间为80ns)。
Y/C分离、视频钳位、同步分离电路原理图见图5。
TMS320C6416T子模块
此模块是本系统处理部分的核心模块。按照通用性强、接口清晰简捷、资源引出最大化、兼顾构建多6416系统的设计思想来设计6416子模块,如图6所示。通过EMIFA接口扩展了两片4M×32bit SDRAM, 可一次读写64bit数据。

图像传输接口设计
图像数据通过2812-DSP-XINTF(16bit)/6416-DSP-HPI(32bit)接口传输,采用一片CPLD将2812-DSP两次输出结果拼接成32bit。优化2812-DSP-XINTF寄存器可使HPI接口传输速率达到最大。对XINTF寄存器的具体优化值见表1。

图像显示
采用VGA监视器显示图像处理结果。标准SVGA接口信号包括:行同步信号(VGA_Hs)、场同步信号(VGA_Vs)以及红、绿、蓝三路模拟信号。VGA所需的时序同步信号由CPLD产生,所需的模拟信号由视频D/A转换器ADV7123实现。显示接口电路框图如图7所示。
由CPLD对各个6416图像处理单元数据输出接口(EMIFB)总线进行总线仲裁,实现各个6416单元的图像数据分时输出。
两片采用“乒乓存取”工作方式的SRAM组成了图像数据缓冲区,每片SRAM存放一帧图像,由CPLD控制。
系统软件设计
系统软件流程图如图8所示。分为三个主要部分:图像预处理、可疑目标提取及目标识别。

图像预处理
图像滤波(多模板复合滤波算法)
对比常用的多种滤波算法,其共同特征是:某种滤波算法只对部分噪声有效;在较好地抑制噪声的同时,难以保持图像清晰度。而采用多模板复合滤波算法,可较好地解决这一问题,为边缘提取奠定了基础。
边缘检测(改进的sobel算子)
常用边缘检测算法受海面波纹的影响较为严重。相比之下,sobel算子效果较好,但也存在漏检边缘点的情况。本算法在传统sobel算子两个模板的基础上,增加了六个模板,用下述八个模板对每个像素分别进行运算,然后取其中最大值替代该像素的值。
这种改进的sobel算子使得边缘检测更加准确,但处理一帧图像的运算量较大。采用改进的sobel算子进行图像边缘检测处理后,将图像二值化。改进的sobel算子不但检测出了全部可疑目标,并且受海浪的影响较小。

可疑目标提取与跟踪
为减少运算数据量,采用二次标记的方法提取可疑目标:
利用贴标签算法进行预标记,统计出物体数目并记录其所在位置;
根据上位机提供的模板信息,提取可疑目标;
进行二次标记,仅标记已提取的可疑目标;
对提取出的可疑目标进行跟踪。
目标识别与跟踪
当提取的可疑目标(一般是指象素数较少的小目标)达到一定的象素数后,采用Hu不变矩特征对可疑目标进行目标识别。
对数字图像f(x,y),p+q阶矩(mpq)和中心矩(μpq)定义为
其中p和q是非负的整数。图像的(p+q)阶归一化的中心矩定义为:

利用二阶和三阶归一化的中心矩求出七个Hu不变矩组:

A(x,y)则为位置(x,y)处不变矩的相关值。取A值最大处对应的点作为匹配点。
由于不变矩描述的是图像的统计特性,满足对平移、伸缩、旋转等变化的不变性,因而广泛应用于图像识别等领域。该算法的不足之处是计算量大。而仅仅处理局部可疑目标区域图像数据的方法,可以大大减少数据运算量。对识别后的目标加框并跟踪。
结论
成功实现了用于海洋搜救的多片DSP图像处理识别系统;
成功实现了2812视频数据采集;
系统硬件的可拓展性增强了系统的通用性;
软件算法实际应用效果明显。
该系统(PCB板见图9)还可实现对搜救目标的被动测距、可见光和长波红外图像的双波段图像融合等功能。另外,系统的强大处理能力和存储空间,使其能在数字图像处理领域发挥更大作用。