红外接近感测:搭建模块,机械考量以及设计折中
接近感测基于红外信号的采集和处理,通常需要两个部件来构成光学前端:一个红外LED和一个光传感器。红外LED向被感测物体射出一束红外信号,一部分信号会反射回来,被红外CMOS光传感器探测到。通过片上的信号调理和模数转换,被数字化的红外信号可以由微处理器或MCU进行后处理,用于各种各样的接近感测用途。
一个典型的红外接近感测系统是由一个光学前端、模拟混合信号处理电路,和一定的机械结构组成的。要做出一个有效的设计,重要的一点是理解接近感测的原理、电路构建模块、机械设计考量、接近感测算法和典型的接近特性。机械部分的设计通常要根据不同应用平台进行设计折中,例如手机、PDA、笔记本电脑和各种消费类产品。设计折中包括器件选型、放置尺寸、玻璃镜片特性、光学设计,以及应用算法和软件实施。
集成的环境光感测和接近感测系统不但能测出周围的光环境,还能探测正在接近或远离的物体。这样微处理器或MCU就能做出更复杂的控制和调整决定,更好地改善系统的能量效率,实现很多用户友好的应用。例如,如果手机能够知道你正把手机贴近耳朵来接听电话,MCU就可以关掉不用的子系统,例如显示屏、键盘或触摸屏,来节省能量,并避免用户无意当中碰到按键。
红外接近感测的基础
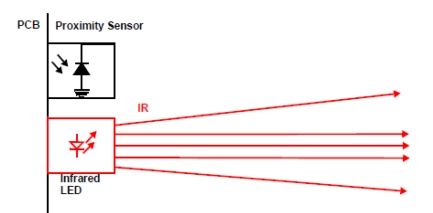
红外接近感测可以用下面的图来简单描述。图1显示了一个例子,当在接近探测路径上没有感测物体时,就不会有反射回来的红外信号被接近传感器捕获到。
相反,当感测物体处在可探测的距离内时,如图2所示,接近传感器会捕捉到反射回来的红外信号。接近读数与捕获的红外光信号的强度成线性比,与距离的平方成反比。
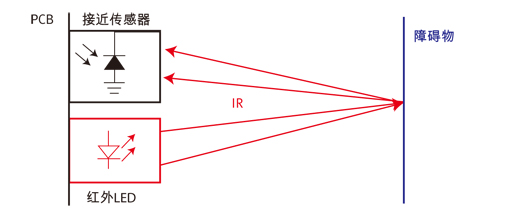
图2
图2,在接近探测区域有感测物体。
典型的数字接近感测传感器功能框图
图3显示了典型的数字环境光和接近传感器中的电路功能框图。光敏二极管阵列是信号调理和采集光学前端的部件。集成的ADC可以把捕获的光信号转换成数字化的数据流,送给微控制器进行后处理,实现不同的应用目的。
不同的配置指令可以通过I2C接口写入。用户还可通过同一个数字接口读出环境光和接近距离的数据流。中断功能直接送到MCU,由MCU控制一个红外LED驱动器,按照接近探测循环期间编程设定和控制的时钟周期,为发射红外信号提供所需的前向电流。
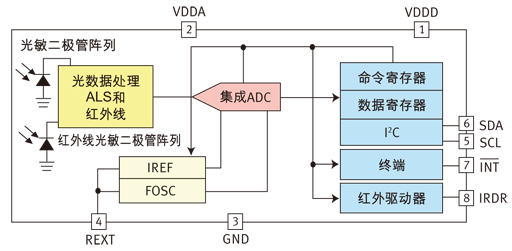
图3:典型的接近传感器功能框图。
机械设计的考量
1)选择红外LED
光学前端的另一个重要部件是红外LED。不同的红外LED具有不同的峰值波长、发光强度和视角。典型峰值波长为850nm~950nm的高亮度红外LED与ISL29011接近传感器的光谱相匹配。窄视角和更高的发光强度能够加大接近探测的距离。选择一款视角、机械占位、发光强度和功耗都比较均衡的红外LED是很重要的。
2)器件的放置尺寸
元器件的放置在机械设计中起着十分关键的作用,决定了接近探测的距离远近。这里有许多决定因素:传感器和障碍物之间的空间距离,障碍物和红外LED之间的距离,障碍物高度的变化,尤其是是否使用光导管。图4显示了一个采用典型元器件放置尺寸的接近感测系统解决方案。
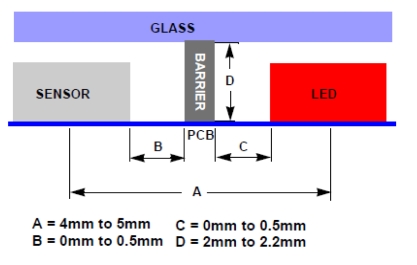
图4,典型的器件放置尺寸
3)玻璃窗口的尺寸和放置
对于一个平面镜片,视角是塑料或玻璃材料折射率的函数。更密实的材料(折射率更高)的有效视角更小,低密度介质的视角更宽。窗口镜片对光传感器的视角有明确的限制。窗口镜片应该直接放到传感器的顶部,镜片的厚度应该尽量薄,以减少光强的损失。
4)接近感测系统算法
完成元器件选型和设计之后,一个稳定耐用的接近感测系统还需要光传感器在各种环境光条件下对不同的感测物体做动态的自校准。一个优秀的接近感测算法是必不可少的,能够帮助接近感测硬件智能地避开来自不同的机械设计局限和恶劣的周边环境的重重障碍,从而持续、稳定地探测距离。
5)典型的接近测量
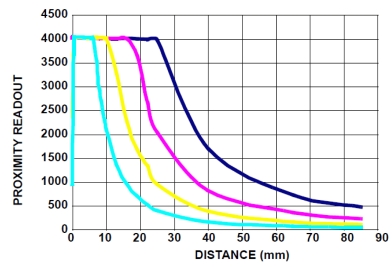
图5
在接近感测系统上采用了各种设计和实施方法后,就能够得到一个不错的接近感测测试系统,如图5所示。环境光和接近感测系统根据特定用户应用的要求进行了优化。在平衡了上述设计折中后,消费者能够对系统的各个方面进行精准地调整,满足应用的要求。
附注:光学基础
大多数光源发出的光都包含可见光和红外光谱成分。不同的光源可以有近似的以流明衡量的可见光强度,但是红外光谱的响应相差会很大。在测量光强时,必须考虑到光的频谱特性和光学传感器的频谱敏感度的差异。采用CMOS工艺的光传感器能探测到大多数红外辐射(峰值敏感度为880nm),因此会误报真实的环境(可见的)状况。
对于灯泡之类的光源,传感器信号要比人眼看到的数量多得多。由这类传感器控制的照明方案的响应可能与环境光谱不符,从而限制了最大接近感测距离。要建立更合适的减光或照明控制,作为接近感测系统解决方案的一部分,一颗能模仿人眼对最大红外信号反应的传感器是必不可少的。图6显示了一个光学传感器的光谱响应,非常适合环境光感测。该图还显示了在接近感测中所使用的红外波长的光谱。
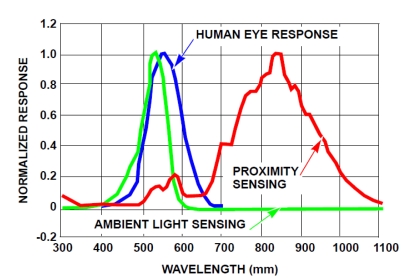
图6,传感器的接近感测和传感器的环境光响应光谱。