现代测控系统在正常工作时往往需要一个基准平台,在这样的客观需求下调平技术应运而生。目前该技术已广泛应用于各种工业领域,如起重机支架、钻井平台、火炮底座、卫星天线基座、导弹发射平台等。传统的手动调平方式费时费力,严重影响了平台上设备机动性能的发挥。自动校准平台的研制弥补了手动方式的不足,并且在效率、精度、可靠性等方面都优于手动校准平台。本文介绍了一种能够实时监控平台状况并通过步进电机进行相应调节的自动校准平台。
1 倾角测量原理
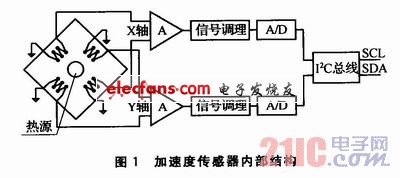
MXC62025G是美新(Memsic)公司推出的一款基于MEMS技术的双轴加速度传感器,集成了片上信号处理和I2C总线模块,无需外接A/D转换器便可以与微处理器通信。该传感器可以同时测量恒定和变化的加速度,测量范围为-2~+2 g,在25℃室温、3 V工作电压的条件下,其灵敏度可达512计数点/g。其内部结构如图1所示,硅片中心有一个热源,四周等间距地放置了4个热电堆。当硅片水平静止时,热源周围的温度梯度是均匀的,所以4个热电堆的温度相同,输出电压相同。当硅片倾斜或在某一方向上有加速度时,热源周围的温度梯度发生扰动,因而输出电压发生变化。
由于传感器的输出不能为负,因而需要减去一个偏移量来区分正负,此处取输出值的中值,即最大值与最小值之和的一半。另外,传感器的输出是加载在两个测量轴上的重力加速度的分量,要输出倾角值还需进行数据处理。假设X轴向的倾角为α,Y轴向的倾角为β,则输出值与倾角大小存在以下关系:
![]()
即

当倾角较小时,轴向加速度与倾角之间近似为线性关系,故有:![]() ,K值选取与倾角误差之间的关系如表1所列。
,K值选取与倾角误差之间的关系如表1所列。

不难看出,测量范围与测量精度是一对矛盾。为了提高系统的精度,应当尽量减小平台调节的幅度,所以自动校准平台应当先大致摆放到水平位置再按启动开关。
2 平台调平原理
目前工程上4支点或更多支点的调平系统应用广泛,这主要是从稳定性角度考虑的,但超过3根支脚后必然要面临超定位的问题。由于虚腿的出现,平台上的设备工作时不能保证每根支脚上的受力具有重复性,从而导致支架形变,影响调平精度。而在3点调平结构中,各支脚受力均匀,只要支脚设计得当就可以保证较高的稳定性,调平控制模型如图2所示。
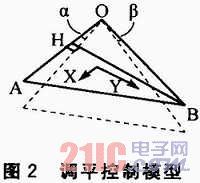
图中的3个顶点O、A、B分别代表3个支撑轴,为了使基座能够适用于不同的环境,设定支脚O的高度为手动可调。传感器在安装时需保证其X轴与OA边平行,Y轴与OA上的高BH平行。当固定了O点的高度后,调节A、B两处,使平台达到水平。为了便于实验,将模型进一步理想化,使点H与O重合。平台调平的实质是将两条相交的直线分别调到水平。
假设平台为刚性结构,加速度传感器的精度为常数,且在X与Y两个方向上的倾角分别为α和β,两轴之间的夹角为θ,则整个平台的水平度γ可表示为:
![]()
根据上面的公式,只有当两轴的夹角为90°时,系统在调平过程中才没有耦合,水平度θ才有最小值。
若两轴上的控制精度为±δ,则系统调平的水平误差![]() 。由于选择的是双轴加速度传感器,它的两个测量轴相互垂直,即θ=90°,故水平调节误差
。由于选择的是双轴加速度传感器,它的两个测量轴相互垂直,即θ=90°,故水平调节误差![]() 。即如果整个平台的水平度要求为0.1°,则X轴、Y轴上的控制精度就是。
。即如果整个平台的水平度要求为0.1°,则X轴、Y轴上的控制精度就是。