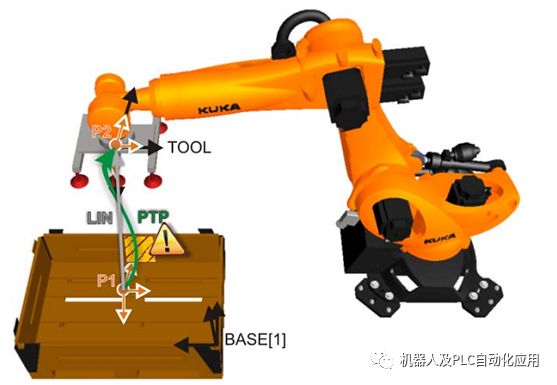
首先要建立机器人的轨迹,作为基础机器人编程轨迹.
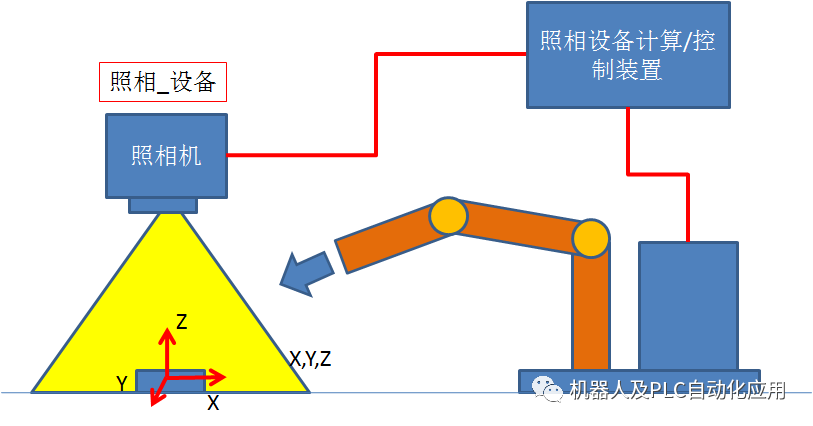
视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的.
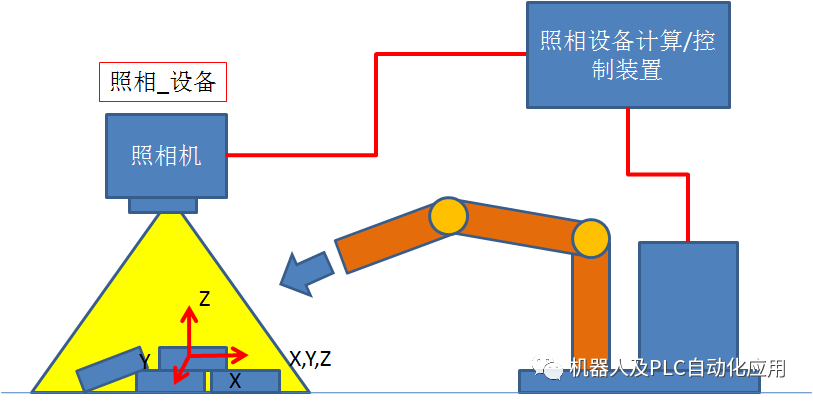
物体位置的变化主要是它位置的X,Y,Z 方向的变化.
BASE坐标系:?可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
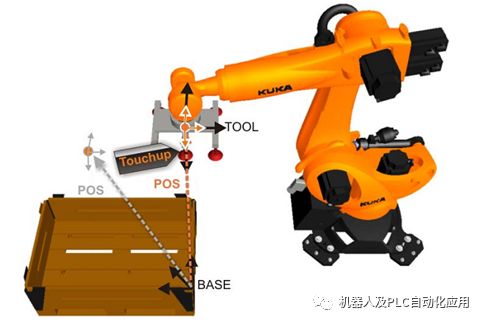
以改变BASE 坐标系为例:?
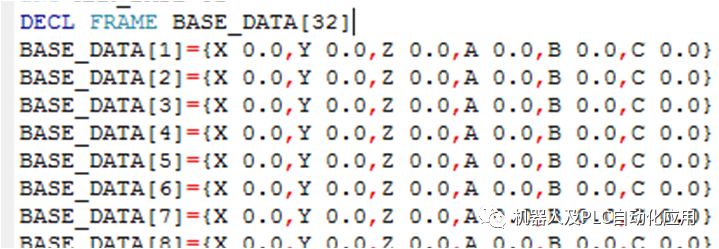
KUKAC4 现在可以使用32个BASE 坐标系
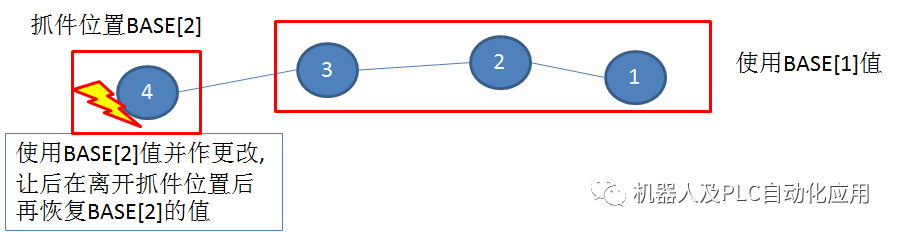
没有使用视觉补偿功能时,只用一个BASE坐标系.
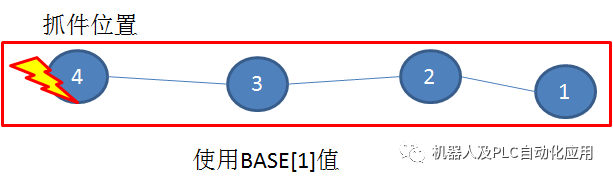
改变机器人BASE坐标系值从而改变机器人抓件位置,使用多个坐标系.