针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列,然后在分析二次成像法获取目标深度信息的缺陷的基础上,提出了一种获取目标的空间位置和运动信息的方法。该方法利用序列图像和推广卡尔曼滤波,目标获取采用了HIS模型。在移动机器人满足一定机动的条件下,较精确地得到了目标的空间位置和运动信息。仿真结果验证了该方法的有效性和可行性。
运动视觉研究的是如何从变化场景的一系列不同时刻的图像中提取出有关场景中的目标的形状、位置和运动信息,将之应用于移动机器人的导航与定位。首先要估计出目标的空间位置和运动信息,从而为移动机器人车体的导航与定位提供关键前提。
视觉信息的获取主要是通过单视觉方式和多视觉方式。单视觉方式结构简单,避免了视觉数据融合,易于实现实时监测。如果利用目标物体的几何形状模型,在目标上取3个以上的特征点也能够获取目标的位置等信息。此方法须保证该组特征点在不同坐标系下的位置关系一致,而对于一般的双目视觉系统,坐标的计算误差往往会破坏这种关系。
采用在机器人上安装车载摄像机这种局部视觉定位方式,本文对移动机器人的运动视觉定位方法进行了研究。该方法的实现分为两部分:首先采用移动机器人视觉系统求出目标质心特征点的位置时间序列,从而将对被跟踪目标的跟踪转化为对其质心的跟踪;然后通过推广卡尔曼滤波方法估计目标的空间位置和运动参数。
1.目标成像的几何模型
移动机器人视觉系统的坐标关系如图1所示。
其中O-XYZ为世界坐标系;Oc-XcYcZc为摄像机坐标系。其中Oc为摄像机的光心,X轴、Y轴分别与Xc轴、Yc轴和图像的x,y轴平行,Zc为摄像机的光轴,它与图像平面垂直。光轴与图像平面的交点O1为图像坐标系的原点。OcO1为摄像机的焦距f.
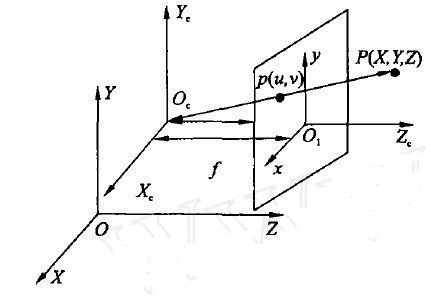
图1 移动机器人视觉系统的坐标关系
不考虑透镜畸变,则由透视投影成像模型为:
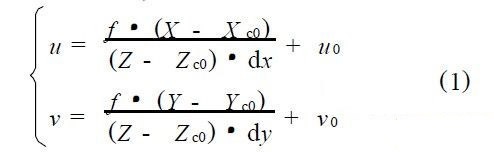
式中,Z′=[u,v]T为目标特征点P在图像坐标系的二维坐标值;(X,Y,Z)为P点在世界坐标系的坐标;(Xc0,Yc0,Zc0)为摄像机的光心在世界坐标系的坐标;dx,dy为摄像机的每一个像素分别在x轴与y轴方向采样的量化因子;u0,v0分别为摄像机的图像中心O1在x轴与y轴方向采样时的位置偏移量。通过式(1)即可实现点P位置在图像坐标系和世界坐标系的变换。