引言
感应无线位置检测是通过安装在移动机车上的天线箱中的感应线圈与敷设在地面轨道旁的编码电缆中传输对线之间的电磁感应,检测感应信号的相位与幅度,从而得到移动机车的位置。感应无线位置检测的特点是重复性好、检测精度高、安全性好、适用性强、抗干扰性强、可靠性高。
1 感应无线位置检测系统总体结构
自动控制系统中,必须解决两个基本问题:a.控制和受控双方可靠的数据通信;b.移动机车所在位置的位置检测。感应无线位置检测系统,将感应无线数据通信和位置检测融合在一个系统中,它由位置信号发生器、编码电缆、感应天线、位置检测器组成。其中感应天线箱安装在移动机车上随机车移动,且始终与编码电缆保持距离z;编码电缆部分由编码电缆、连接电缆、匹配阻抗构成。感应无线位置检测系统框图如图1所示。
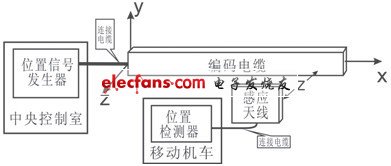
图1 感应无线位置检测系统框图
2 感应无线位置检测方法研究
2.1 APD检测
一般位置检测(APD)原理:中控室地面局按一定顺序,分时向编码电缆中各检测位置传输对线发送载波信号,天线箱中的感应线圈作接收线圈,移动机车上的位置检测器检测接收线圈收到的载波信号,进而得到接收线圈的位置。APD检测结构平铺图如图2所示。
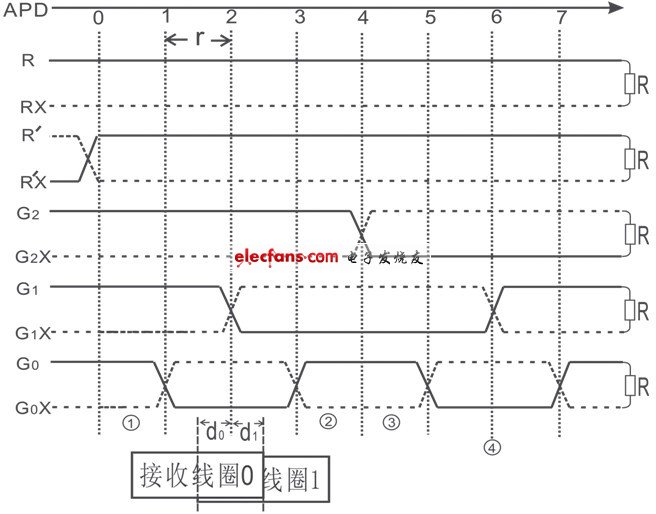
图2 APD检测结构平铺图
在t0、t1、t2、t3、t4时间段,分别向传输对线R、R’、G2、G1、G0发送载波信号,在t5时间段不发送。车上天线箱中有两个接收线圈:接收线圈0和接收线圈1。APD检测是从接收线圈0感应信号的相位中得到APD位置。在t0时间段,线圈0感应的是R线发送的信号,称为R信号;在t1时间段,线圈0感应的是R’信号,R’信号与R信号反相,记为=1,作为起始位;在t2时间段,线圈0感应的是G2线发送的信号,G2=0或1,取决于接收线圈0的位置。若接收线圈0的中线分别在①、②、③、④的位置,则接收线圈0的接收信号的相位如图3所示。
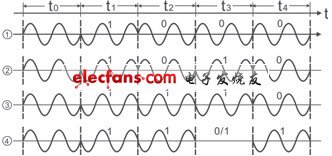
图3 接收信号相位示意图
由于各路G对线按照格雷码规则交叉,所以相位比较的结果数据G2 G1 G0是一组格雷码,设格雷码G2 G1 G0对应的十进制数为g,即g为APD位置数据。对图3中的二进制绝对相移键控(2PSK)调制信号进行解调,并以=1作为起始位,则有:在图2的位置①, G2 G1 G0=000,g=0;在位置②,G2 G1 G0=010,g=3;在位置③,G2 G1 G0=110,g=4;在位置④, G2 G1 G0=111或101,g=5或6。可得到APD位置公式为:

2.2 HRPD检测
高分辨率位置检测(HRPD)原理:位置信号发生器分别对传输对线G0、发送载波,检测接收天线线圈1感应信号幅度,通过运算得到HR-PD位置。以线圈1中心线为移动机车的位置,传输对线两交叉间的区域称为K区域K=I,II,III…);线圈1中心线偏离G0、传输对线所在区域中心线距离分别为d0、d1,显然d0+d1=r。HRPD位置检测如图4所示。
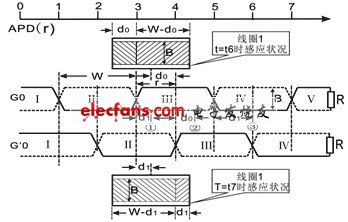
图4 HRPD检测平铺图
在t6时间段,位置信号发生器对G0传输对线发送载波时,G0的III区域对线圈1的感应面积为:S=(W-d0)xB,G0的II区域对线圈1的感应面积为S=d0&TImes;B,由于II、III区域对线圈1产生的感应信号相位相反,所以线圈1有效感应面积S=(W-d0)&TImes;B-d0&TImes;B=2(r-d0)&TImes;B。设线圈1最大感应面积Smax=W×B=2r×B,对应感应信号最大幅度为Amax(y,z),则有:
在t7时间段,位置信号发生器对传输对线发送载波时,对线圈1感应信号作相同的分析,得:
令
且有:
(1)线圈1的中心位于G0两交叉间左半部(图4位置①),此处检测出来的APD位置数据g为奇数,则HRPD=d1=P0×r。
(2)发送线圈的中心位于两交叉间左半部(图4位置②),此处检测出来的APD位置数据g为偶数,则HRPD=d0=P1×r。
综上(1)(2),可得高分辨率位置HRPD和综合位置ADD分别为: