基于AD采样的算法
基于AD的黑线提取算法能够反映图像上的每个点的黑白程度,提取出来的黑线准确度比较高,但是后续的黑线提取算法比较复杂。基于电压跳变比较方法软件黑线提取非常简单,但是硬件调试比较困难,而且不能反映每个点的真实黑白程度。对赛道环境要求很高,易受干扰。
基于AD的黑线提取有以下几种方法:
1) 找出每一行的黑线的左右边界点,把中间点作为道路;
2) 利用若干行相加,取最黑点;
3) 找出每行的最黑点,把它作为道路。
第一种做法:找出每一行的黑线的左右边界点,把中间点作为道路。
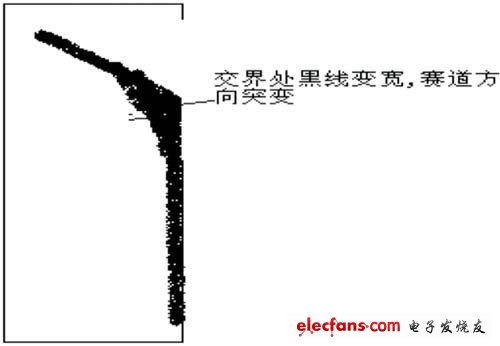
图1 斜看十字交叉道示意图
它是最容易想到的方法,在无交叉道以及摄像头的黑白AD值分明的情况下,它可以达到非常理想的效果。但是若出现了斜看交叉道或者黑白AD不是很分明的情况下,该方法的滤波显得十分复杂。在实际中由于摄像头对于远处的黑线不是很敏感,这使得黑点的阈值很难以确定,选大了会使远方道路提取出错,选小了会丢失远方的道路信息。也许采用动态阈值是一个好方法,但是它也不是十分管用。在实验中我们发现黑点的阈值不是随着距离的变化成线性变化的,它的变化多少带有点突变的味道,因此很难确定黑点阈值的变化规律,自然动态阈值也很难设定。斜看十字道会带来更大的麻烦,由于在实际的控制中很难做到每次都严格地贴线走,因此小车在从弯道出来的时候若弯道前方有个十字道,很容易造成斜看的情况发生。这时从AD采集的图像上看来十字交叉道会像一个分叉的树枝一样从前方道路上出来,更糟糕的情况是在前方正确道路消失的地方恰好被斜的十字道路的一边给补上了。若采用这种方法,则很容易误将道路确定到十字叉的一边上,使得小车的转向错误。为了滤除这种情况,我们根据它的特点采用了很多的滤波方法。
首先,在前方道路与十字叉的交界点,黑点的个数会突然增加很多。在一般情况下,随着距离的增加黑点的个数会慢慢减少,不会出现突然增多的情况。因此我们可以用上一行的黑点数,估计出下一行的黑点数,如果超出了我们的估计值,我们就认为它是不合理的。
其次可以根据赛道不突变的原则,来滤除杂点。我们可以根据前面两行的变化情况预测出下一行的赛道变化范围,利用它来滤除杂点。但是在实际的应用中下一行的变化范围预测总是不是很理想。因此当赛车经过90度弯时,赛道的变化在小车看来变化是十分巨大的几乎和斜看十字交叉道没有多大的区别。有时会将90度弯滤除,造成小车直接冲出跑道。
最后,我们还可以通过分别从左至右与从右至左的方法来所搜赛道的左右边界点,若发现两者不一致,则可以采取取变化较小的点作为赛道来处理。
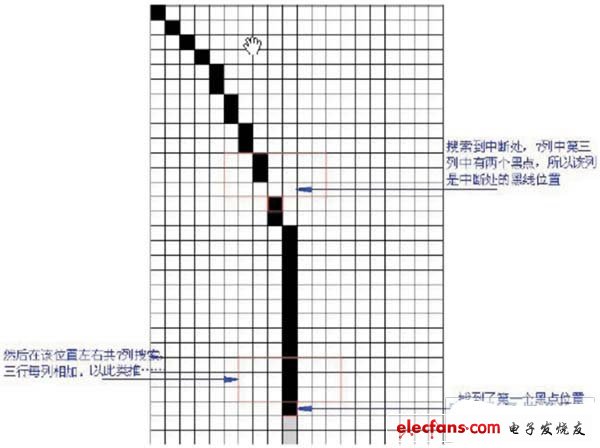
图2 三行相加提取黑线示意图
加了以上的滤波以后真个搜索赛道程序会显得十分复杂,而且也不是十分可靠。
第二种做法: 利用若干行相加,取最黑点。
这种做法是我们上届的学长提出来的算法。但是我利用起来不是很可靠。它的头点始终采不稳定。它的三行相加的理由是若中间一行右黑点丢失,它可以利用自己设定的阈值把它找回,如三行相加的黑点阈值可以定义为1个白点与2个黑点的和。带有些中值滤波的味道。 但是,由于远处的黑白不是很清楚,本来黑白的阈值就难以设定,三行相加的阈值就更难设定。而且在弯道上由于远方的点本来就少,大约只有一两个黑点而且又不在同一列上,很容易将这些点丢失,导致头部的点不稳定。为了尽可能地将远方的黑线提取出来,从软件上将唯一的方法就是增大阈值,比如将三行相加的阈值设置为一黑二白相加,但是问题是远方的黑白不是很明显,白点比较黑,黑点比较白,这种阈值的选取很容易造成把远方的那些比较黑的白点也一并归入黑线之中,这使得小车的转向发生混乱。
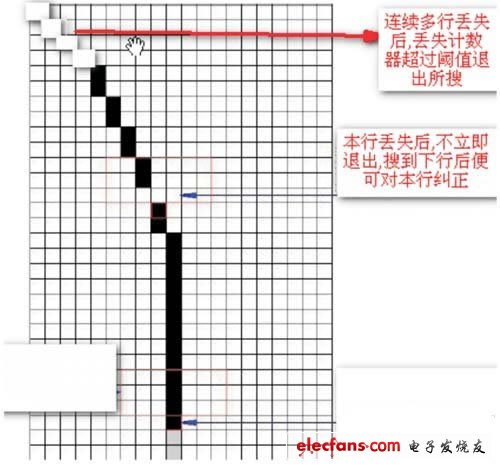
图3 逐行找黑点
第三种做法: 找出每行的最黑点,把它作为道路。
由于每行搜索的是最黑点,因此可以将黑点的阈值稍稍扩大一点,即使远方的黑白不清,由于找的是最黑点因此还是可以提取出真确的黑线的。它的主要问题是,不一定每行都有符合要求的点,会造成一行丢失而失去后面的黑点。解决的方法是当发现一行丢失以后,不立即退出搜索,而是置一个丢失计数器,只有当丢失计数器的值连续累加到一定的阈值后才退出。当每次搜索到一行的黑线后看看丢失计数器是否为非零。若不是,则说明前面没有丢失行。若是,则说明前面有几行丢失了。我们可以根据这一行与上以有效行对中间的丢失行对中间的丢失行做一个线性化处理。然后清零丢失计数器。有了丢失计数器,我们可以对赛道的提取条件加以严格的限制,而不必担心黑线的漏检。比如我们可以严格限制黑线的宽度,这样我们可以很容易滤除看到大块的黑斑带来的干扰;对于上述的斜看十字交叉线的问题我们只要根据上一行的黑线严格限制下一行黑线出现范围便可轻松滤除。当然在发现丢失行以后对于下一行的搜索必需加大黑线搜索的范围,允许的连续丢失行越多则再次找回的黑线的可信度也就越低,在实际的提取过程中必须把握好这一阈值,使得即可以顺利找到前方的道路,又不至于误提取黑线。实际证明这种方法实现简单,可靠性也最高,黑线提取十分稳定。