0 引言
异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,矢量控制是电机控制系统的一种先进控制方法,由于其交流调速时的优越性被广泛应用到异步电机调速系统中。基于Simulink 的交流异步电机仿真可以验证系统设计方案的有效性,在实验室应用过程中可能遇到系统设计难题。
本文以双闭环矢量控制系统为研究对象,在Simu-link 中进行仿真来验证控制系统的有效性。通过分析仿真结果得到矢量控制系统的动静态特性,从而证实了本设计方案的可行性。
1 矢量控制原理
矢量控制系统,简称VC 系统,坐标变换是核心思想。矢量控制的基本思想是以产生同样的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流等效成两相静止坐标系上的交流电流,在通过坐标旋转变换将其等效成同步旋转坐标系上的直流电流,等效过程中实现磁通和转矩的解耦控制,达到直流电机的控制效果,得到直流电动机的控制量。便可将三相异步电动机等效为直流电动机来控制,获得与直流调速系统接近的动、静态性能。
矢量控制中矢量变换包括三相-两相变换和同步旋转变换,将d 轴沿着转子总磁链矢量φr 的方向称为M 轴,将q 轴逆时针转90°,即垂直于矢量φr 的方向称为T 轴,经过变换电压-电流方程改写为式(1),磁链方程为式(2):
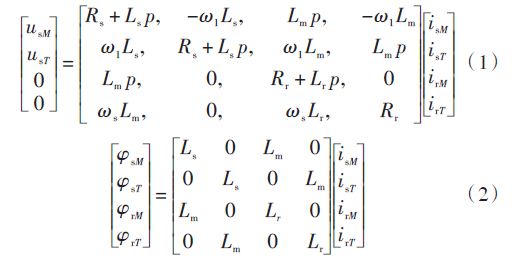
化简可得转矩方程为:

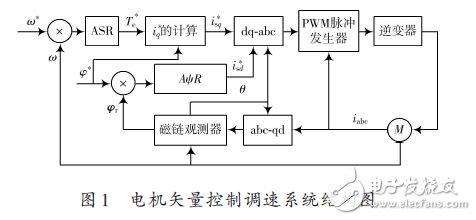
由式(2)可得转子磁链φr 仅由定子电流励磁分量isM 产生,与转矩分量isT 无关,而isM 和isT 是相互垂直的,这两者是解耦的。矢量控制变频调速系统结构如图1所示,从图1上可以看出系统采用了转速、磁链的闭环控制。图中标*的量为给定量,其余为实际测量值。
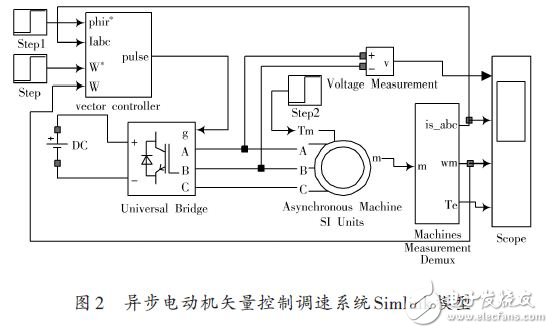
2 基于Simulink 的异步电机矢量控制系统仿真模型
2.1 系统总体模型
根据矢量控制系统原理,利用Matlab/Simlink软件中的电气系统工具箱SimPowerSystems对系统进行仿真。
整体系统的仿真模型如图2所示。