这篇文章主要聊聊ADAS数据库的事情,聊一聊诗与远方。我觉得ADAS和无人驾驶是一个特别很难突破的地方:
1)上维度就是这个
2)正中间就是车
3)下维度就是各种自动的机器人
前几日分群,在不停把将来需要讨论的问题进一步细化,这是我们这个专业群未来讨论问题的方式,也给其他人的讨论做一些借鉴,总体来看我们可以从这个方面来看问题。
a)定期组织技术架构的分部分的讨论
b)分来源进行情报的交流和分析探讨
c)分应用进行问题和场景的探讨和考虑
整个的概念,是将整块技术和架构内容分解,然后根据每一块,定期组织一些讨论,谈谈大家的认识,补充然后进行思辨。
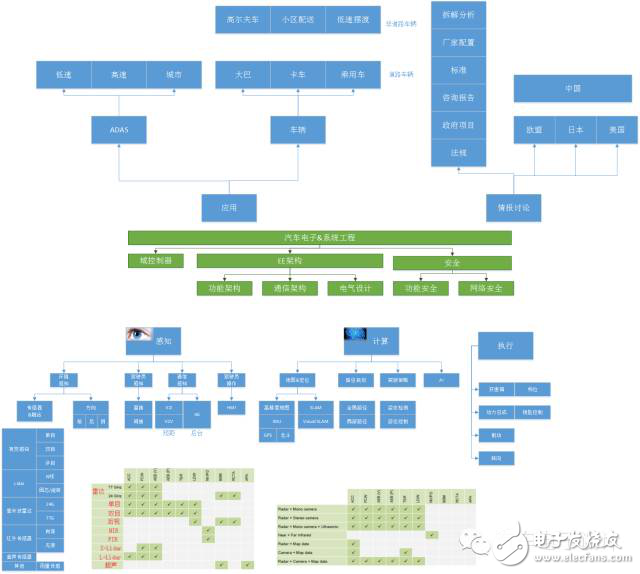
1)ADAS&无人驾驶 技术分解
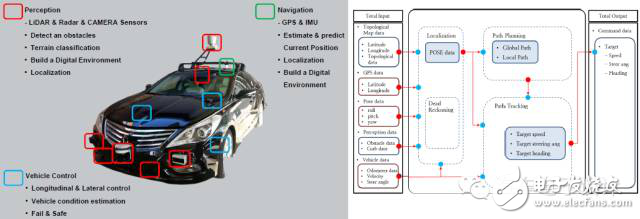
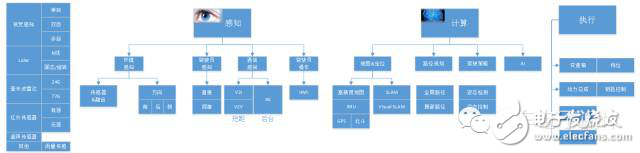
感知:(传感器感知车内外信息)、识别(车辆周边环境量化)、联网(车与后台,车车之间的数据交互)
计算:定位(位置确定和车辆姿态判定)、路径(车辆的行驶路径算法规划)
执行:车辆控制,包括各个部分的接口
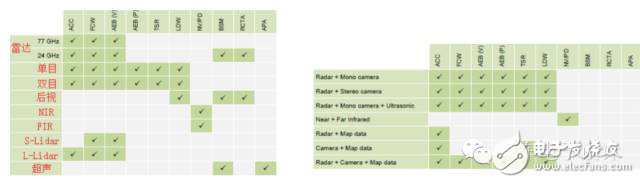
为了实现ADAS+Autonoumous功能,检测障碍物的传感器包括摄像头、红外线传感器、毫米波雷达、激光雷达、超声波传感器等多个种类,这些传感器都各自有优缺点。
核心是融合评估:整合控制多个识别传感器的传感器融合,之后的功能和评估。
这里是重点讨论实际的过程中的一些东西了