本文主要从几个方面来谈谈自动泊车的技术,第一部分是自动泊车的发展历史,第二部分是自动泊车的内部结构和一些厂家的方案。值得注意的是,在不同的 国家,落实不同场景自动化的意愿也不相同,唯一确定的是,大家都不爱停车,确切的说是不爱找车位和停车。这是整个汽车智能化和自动驾驶里面最迫切的需求, 也是一个比较容易切入的环节。
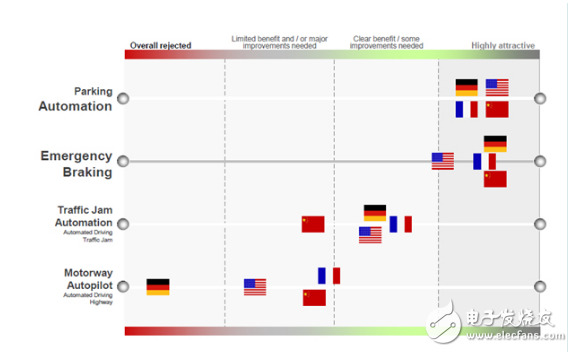
△图1 各个自动驾驶功能的民众接受度,自动泊车需求呼声很高
第一部分 自动泊车的发展历史
泊车辅助系统可以分三个大的阶段,分为被动式、半自主式泊车辅助、全自动泊车。
1)被动式:在泊车时提醒驾驶员前方或车辆后方障碍。在发展的过程中从只有后方预警,发展成车辆往前运动前方检测也有预警、加入视觉图像、加入辅助线还有周边盲区预警,到现在最复杂的是两种系统结合,包括倒车雷达+360度环视的两种功能。
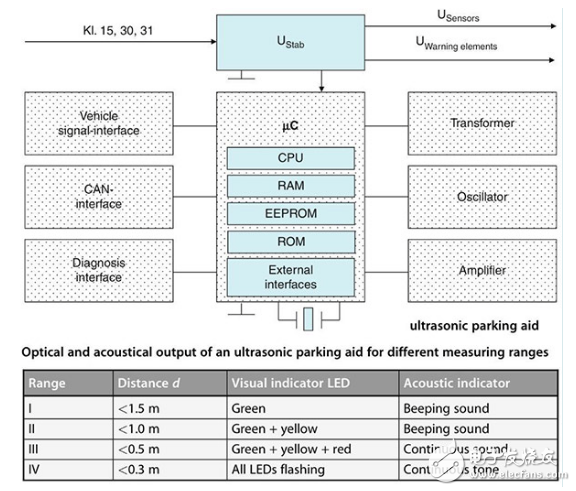
△图2 被动式泊车系统结构
被动式主要利用超声波传感器+蜂鸣器+HMI图标来提示驾驶者外部障碍物情况,防止车辆在倒车时碰撞,一般由下面几个功能构成:
防碰撞声音+图像提示
测量停车位大小的系统
提供转弯角度的提示
提供后视图像和辅助线检测
360度环视图像
被动式是充分考虑了成本的系统,采用低成本的超声传感器来实现倒车时候的障碍物检测,一般距离为1米~1.5米的情况,消费者对此类系统接受度高。