早在二十年前,汽车制造商就已经开始使用MEMS(微机电系统)传感器中的加速计来测量行驶过程中的加速度并且触发安全气囊。如今,一项具有前瞻性的微小装置——惯性传感器为加速计在驾驶员辅助系统中得到更广泛的应用开辟了全新的道路。
目前的驾驶员辅助系统中已包含多种MEMS惯性传感器,如陀螺仪、压力传感器和磁力计。陀螺仪能够监测侧翻车辆的绕X轴旋转——这也是碰撞监测算法中最重要的一环。事实上,如果没有这项技术带来的防侧翻安全性能,也就不会出现如今广受大众喜爱的SUV车型了。

惯性传感器对于未来自动驾驶的重要性毋庸置疑,它们能够实现诸多驾驶员辅助功能,这些功能有些已经来到了我们的身边,有些在不久的未来即将面世。
工程师们在设计驾驶员辅助系统时需要对MEMS惯性传感器有哪些了解呢?这些技术在未来十到二十年内,对汽车制造商和消费者们又意味着什么呢?让我们来共同探讨一下这些不同类型的微小传感器在当前以及未来的汽车技术中将如何发挥作用。
侧翻传感并非易事
侧翻传感,作为一项被动安全技术,主要用于监测车辆是否遭遇倾翻,进而触发安全气囊。这样的惯性传感器能为碰撞监测算法提供最关键的数据反馈(滚转角速度、横向及纵向加速度)。
然而,在这一过程中将会存在一个难点,就是如何在各种不同的条件下,比如在极低或极高的温度下,在高速公路上,或是在碎石路上,保持可靠的传感信号。另一项主动安全技术——车身电子稳定系统ESC,通过控制和触发制动来避免车身打滑,也同样要求在不同条件下提供可靠的传感信号。
应对这一难点的一种解决方法就是精心设计出一套既整合了MEMS的设计特点同时又满足汽车系统需求的装置。首先需要根据不同规格来设计产品,样品也必须先在实验室中进行测试并且能够满足文件中的所有要求。最后,传感器还需要通过一些实际的驾驶测试,比如在寒冬季节或是在碎石路上行驶。
在“城市峡谷”中也能导航
如今的车主早已熟悉了内置导航系统,这样的系统免去了驾驶员在不熟悉的城市中自己规划路线的烦恼。依靠地图、全球导航卫星系统以及路径算法和惯性导航系统等,车主能够通过诸如“道路拥堵辅助”这样的互联服务,获取实时的道路拥堵信息。

汽车工程师们通常青睐于在导航系统中加入惯性传感器,因为这样,无论是在各种建筑鳞次栉比的城市中,或是在全球导航卫星系统信号较弱甚至会中断的地区,他们的系统依然可以运行。通常惯性传感器在获取了最后一条可靠的卫星信号之后仍然可以更新位置信息。
譬如当一位驾驶员正在隧道里行驶,定位系统信号无法被接收,惯性传感器就会以单位距离来计算汽车行驶的方向。航位推算法则会计算车辆的位移,继而依据惯性传感器的信号,推测出车辆当前的具体位置。
多种多样的驾驶员辅助系统
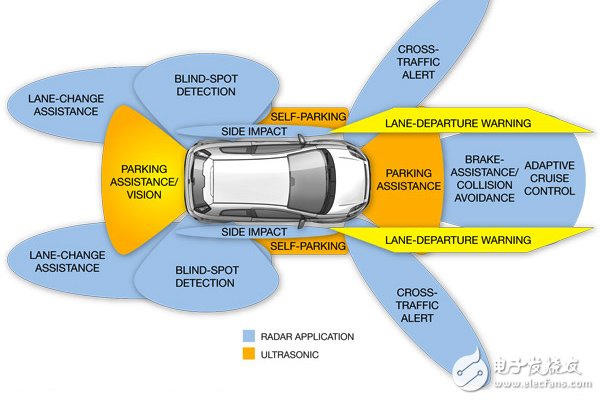
驾驶员辅助系统绝不仅限于我们日常所熟悉的定速巡航或是倒车影像。自适应巡航、车道保持和变道辅助、预测性紧急制动系统(AEBS)以及主动前轮转向系统等,这些都属于驾驶员辅助系统,并且它们都依赖于惯性传感器与摄像头、雷达或激光雷达这些感应系统的智能融合。
自适应巡航比人们熟知的传统的定速巡航要更以经验为导向。尽管传统的定速巡航省油且能为长途驾驶提供更高的舒适性,但驾驶者需要根据周围车辆的车速,不停地手动打开或关闭巡航功能。相较于在巡航过程中始终保持恒定速度,自适应巡航则能根据实际需求来自动调整车速,以便与周围车辆保持安全距离。
自适应巡航主要通过雷达、摄像头以及射线来测量与物体之间的距离。同一种用于车身电子稳定系统的惯性传感器同样也能用于自适应巡航。这种传感器能够帮助预测路线并且传达给障碍物探测器。
另一种类似的惯性装置则应用于坡道辅助系统,用来防止上坡的车辆向后溜车。装置内的小量程重力加速度传感器能够通过测量重力来确定倾斜度。
主动转向系统则是另一项驾驶员辅助技术,用以更快地减少转向轮胎每次移动时转向角度的变化量。这一特性为更精确安全的驾驶提供了保障,尤其是在高速公路上。其中偏航角速度传感器能够提供关于车辆位移的信息。
如今,部分驾驶员辅助系统已经在一些中端车型中得以应用,而非仅限于豪华车型。宝马很早就已经引入了主动转向系统,福特也在其SUV车型“锐界”中应用了该系统,不久的将来,势必会有更多汽车制造商将紧随其后。
就好比惯性传感器可以通过与摄像头、雷达和激光的结合来实现驾驶员辅助功能一样,预测技术则可以通过预测车辆的位移来实现自动驾驶。
“妈妈快看,我没用手!”
当前的自动驾驶结合了一系列现有的驾驶员辅助功能。全自动的车辆需要对车身周围的环境了如指掌,并且能够预测其他车辆和行人的举动。预测技术能够通过高精度地图和视觉系统来预知车辆在高速公路上的行驶路线,这要比在城市道路中来得容易地多,不过后者也将在不久的未来得以实现。这种类似“深度学习”的人工智能技术对于未来全自动驾驶车辆来说必不可少。
定位和导航
在全自动驾驶中,汽车好比一个机器人,回答着各类问题,例如:“我在哪儿?”“我想去哪里?”以及“我该如何去那里?”这些问题的答案主要来自于英寸级的精准定位,它们对于未来自动驾驶和全自动车辆来说都至关重要。我们日常使用的导航系统能够直接规划好去距离最近的星巴克的路线,相比较而言,定位系统要来得更为精确,甚至能够准确定位车辆在哪根车道上。
在自动驾驶的车辆中,定位功能主要来源于以下两个领域所应用的技术:机器人和交通运输。
运用摄像头、激光和雷达这样的感知系统,机器人研究者已经研发出了一种全新的方法来确定驾驶员和物体之间的相对位置。举例来说,机器人汽车可以依据实时定位与地图系统,绘制出车身周围的环境,并且将自己的位置与这些环境相关联。利用周围的地标性建筑,并且在内置的高精度地图上确定这些地标的位置,就能相应地获取到车辆的位置。
惯性导航系统,能够通过测量加速度和旋转角度来确定车辆绝对位置的变化,这一技术已经在交通运输业中得到了充分的实践。以起初的绝对位置(可以通过全球定位导航系统、地标定位或是实时定位与地图系统得出)为起点,捷联算法能够基于惯性传感器的读数来计算出变化后的位置。
依据定位的不同精确度,惯性导航系统有时会需要高性能的传感器,来避免细微偏差引发的严重后果,类似环形激光陀螺仪和光纤螺旋仪这样的光学传感器就能够满足最高要求。近年来,高性能MEMS已经成功进入了战略规划市场。
惯性传感器和感知传感器的融合
那视觉和感知系统又是如何从惯性传感器中获益的呢?视觉或是感知传感器能够察觉到正在运动的物体,正确判断出运动物体的结构,同时估测车辆的移动情况以及和周边运动物体之间的距离。
惯性传感器则完全不受感知传感器的限制因素所影响,比如天气条件、光照、雪地或是被遮挡的地标。惯性传感器不会依赖于周围环境的亮度,因为它们测量的是物理性运动,而且并不是从图像中计算数据。此外,惯性传感器要来得更为可靠,因为它们不需要与车身以外的设备有任何的互联和数据交流。近期有一项研究就分别讨论了动觉惯性传感器和视觉感知系统在弱耦合和紧耦合两种程度下的不同合作模式。
在弱耦合程度下,感知系统和惯性传感器会各自独立地定位车辆,随后相互比对信息,修正结果。紧耦合则是另一种结果,此时对物体直接的(像素级别)视觉测量会与惯性测量装置的读数相互结合。
在两种情况下,MEMS惯性传感器都可以提高感知系统帧到帧跟踪物体的兼容度,从而得到更精准的定位。
未来在何处?
在自动驾驶功能演变革新的道路上,驾驶员辅助系统,例如车道保持和变道辅助、预测性紧急制动系统以及主动前轮转向系统等,都将成为人们越来越熟悉的部分。部分自动驾驶功能,譬如交通拥堵辅助系统,目前已经上市,在未来几年也将逐步得到扩展。高级自动驾驶功能则会紧随其后。
在2020年之前,我们期望能在高速公路上实现全自动驾驶。在城市中的自动驾驶,预计还需十到十五年来完成。
有如此丰富的技术可供使用,相信汽车制造商将会持续满足消费者对于驾驶员辅助系统广泛推行的需求,直到全自动或部分自动驾驶功能可以惠及大部分的消费者。尽管全自动驾驶尚需时日才能彻底实现,不过MEMS以及一系列由传感器创造的驾驶员辅助系统已经给我们的生活带来了诸多益处。