在本博客的第 1 部分,我们解决了汽车系统设计人员在实施视觉安全系统时的部分设计挑战。我们将在这个部分详细讨论逆视频通道数据方向驱动控制数据的选项。
随着汽车中所使用的显示器、摄像头和传感器数量的倍增,这些模块与主机设备之间所需的连接数量也在不断增加。线束内每增加一条线缆,都会增加成本和重量,影响生产装配成本与可靠性。然而还有个不太明显的问题,那就是随着视频链路数量的增长,用于控制和更新摄像头及显示器的数据连接数量也在增加。例如,在初始化及工作过程中,主机设备经常向摄像头发送控制设置信息。驾驶室内基于驾驶员设置或传感器的中央控制器可自动调整亮度和背景照明设置。
另一个实例是提供触摸屏显示器,其中的位置或多触摸信息需要发送回中央单元。关键点在于控制数据传输方向与视频数据流传输方向相反。
要实施这种控制通道,标准方法是分别运行与视频链路并行的控制线路 — 从摄像头到主机设备或从主机设备到显示屏。设计挑战在于如何更高效地利用已有线路及连接器充分满足视频、控制与数据信号的需求。
想象一下在高速公路上逆行开车而且不会撞到对面来车的这种情形。这并不是建议使用碰撞避免系统,而是一个比喻,用来形容提供数据流方向与主要高速视频数据方向相反的控制路径所面临的挑战。如前文所述,理想的解决方案是只使用现有配线提供这种控制通道,而且实际上可采用好几种方法实施。
显示器倾向于利用源自老 CRT 显示器时代的视频消隐期来发送非视频数据。CRT 显示器要求将消隐期添加到每个有源视频线路和区域的末端,以实现波束的“反激”时间。经过多年发展,创意视频系统设计人员现已利用消隐期传输字幕文本或视频时间代码等信息。
?
?
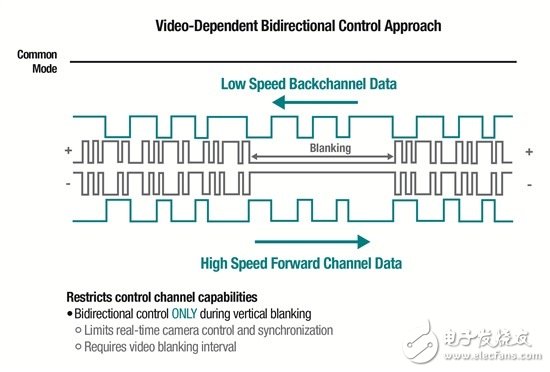
图 1.在视频消隐期实施的控制通道
LCD 等较新的显示技术一直保留着消隐期,尽管它们确实已不再需要了。图 1 是利用视频消隐期发送控制信息的方法,但是所传输数据的量局限于消隐期的长度和频率。如果支持 30Hz 典型帧速率的系统只使用垂直消隐期,这就特别有局限性。此外,业界还有一种趋势是大幅消除这一浪费的开销,因为这将对功耗和像素时钟速率产生直接影响。
这种方法的其它不足还在于控制数据必须排队等待传输。所产生的延迟会导致无法确定的时延,这对很多应用来说是无法接受的,例如需要微秒级响应时间的碰撞避免系统。此外,这也会限制控制数据的精确定时具有相关性的应用。例如,要使用这种方法同步多摄像头系统就是一个挑战。
?
?
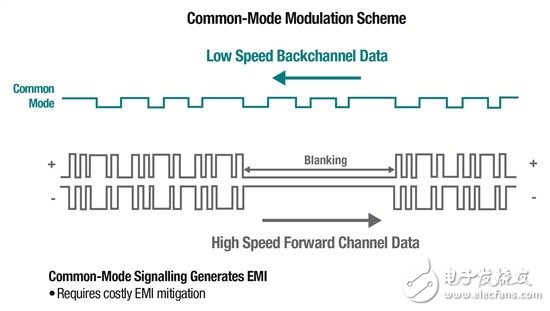
图 2 使用视频数据共模调制实施的控制通道
另一种方法利用的是主视频通道中信号的差分属性,如图 2 所示。控制数据可作为数字化视频信号的共模调制信号有效耦合在线缆中,但这可带来基本的 EMI 问题。汽车应用还可实施非常严格的 EMC 标准,以避免电子子系统之间的干扰。还记得为最大限度降低 EMI 所做的良好工作(将差分信号发送与数据随机化、解扰以及 DC 均衡配合使用,以避免任何残留共模信号)吗?故意引入作为传输控制数据方法的共模信号将大幅抵消所做的良好工作。因此这种方法显然又是一个死胡同。
德州仪器 (TI) FPD-Link III 串行解串器芯片组可使用完全不同的方法克服以上方法的局限性。FPD-Link III 技术可通过单条线路对或同轴线缆同时传输高速视频数据和控制数据。双向控制通道可在传输视频与音频数据的同时继续运行。串行器及解串器中的接收器可从反向传输(接收器至发送器)的较低速数据中将正向(发送器到接收器)通道数据分离出来。这种方法的实现主要基于所传送数据与混合数据之间的相关性。点击这里,了解有关串行解串器芯片组的更多详情。