1 引言
基于机器视觉的辅助驾驶系统旨在提高驾驶员的环境感知能力,通过辅助系统监测外界环境,并在非安全情况及时向驾驶员发出预警,从而使人—车—路系统更加稳定、安全、可靠,提高汽车的安全性能。
开发基于机器视觉的辅助驾驶系统时,需要面对以下难点:
(1)系统算法复杂,代码繁多。机器视觉主要是借助摄像头采集外界信息并将其转换为数字图像信号进行处理,面对不同的外界环境和检测目的,致使系统需要处理的针对点不一样,因此,使得整个系统在算法方面异常复杂,开发过程缓慢。
(2)测试环境要求苛刻。在系统开发后期,测试其性能并进行整改是整个研发过程中的关键步骤之一。相比较于其他汽车电子产品,基于机器视觉的辅助驾驶技术产品在测试时需要考虑两点因素:第一,实车试验时,驾驶员的安全是否能够得到保障;第二,测试过程需要有效、可信、可从复,便于及时发现问题并进行整改。
在开发基于机器视觉辅助驾驶系统过程中,如果能把上述难题顺利解决,将为以后基于机器视觉的辅助驾驶技术产品研发做好铺垫,提高辅助驾驶技术产品的开发效率,促进辅助驾驶技术产品早日投入量产,最终提高汽车的安全性能。
?
2 设计背景和设计原则
针对以上在机器视觉辅助驾驶系统研发及测试过程中存在的问题,考虑到NI公司的EVS和PXI平台出色的图像处理能力及强大的实时仿真测试功能,采用LabVIEW编程语言,通过VeriStand开发平台集成仿真测试模型,设计了一套基于NI EVS和PXI的机器视觉辅助驾驶开发系统。
借助NI EVS平台可以快速实现基于机器视觉的辅助驾驶功能,这主要是依托NI EVS平台的如下特点:
(1)高性能的多核处理器,2GB RAM适合快速检测和大型图像处理;
(2)连接多架相机以实现同步检测(千兆以太网视觉和IEEE1394标准),可用于多种驾驶辅助功能的开发;
(4)借助视觉生成器配置实现自动检测,无需进行底层驱动和接口电路的设计开发;
(5)视觉开发模块Vision Development Module(VDM)集成了大量常见的机器视觉处理基础模块,开发人员将集中于集成和应用,快速实现各类的检测和识别功能;
(6)采用图形化编程方式,更加便于开发人员进行复杂算法的开发和调试。
当设计人员有新的创意时,运用该系统可以快速将创意实现,提高了系统开发的效率。其中,视觉开发模块(VDM)可以让设计人员更多的关注不同算法实现的效果,减少在编程方面的精力投入,通过综合比较,进一步提高系统的性能。
借助NI PXI平台可以在有效、可信、可从复的环境下对系统进行测试,以便及早发现问题并整改。NI PXI平台在以下几个方面具有独特的优势:
(1)提供图形化软件开发环境和良好的人机交互元素,重点关注应用程序开发,无需关注底层驱动,人机界面易开发;
(2)良好的实时性,保证数据采集和测试的时序要求和实时性,能够运行复杂的车辆模型;
(3)系统可靠性、集成度高,可扩展性好;
(4)具有很好开放性和扩展性,能够集成其他软件平台开发的各种模型。
综合NI EVS和PXI的优点,采用LabVIEW编程语言,通过VeriStand开发平台集成仿真测试模型,开发了一套基于NI EVS和PXI的机器视觉辅助驾驶系统。
3 系统技术原理和设计架构
针对机器视觉辅助驾驶系统开发所面临的难题及相应的解决方案可知,设计的系统应具有以下两个功能:
(1)机器视觉系统的快速开发与实现。借助NI EVS平台,将预先设定的需求功能通过编程实现,并保证整个硬件系统满足功能需要。
(2)基于机器视觉的驾驶辅助功能的可信、有效和可重复的测试。借助NI PXI平台,搭建一套虚拟测试系统,从而测试机器视觉开发部分出现的问题,以便及时整改,提高系统安全性能。
根据上述思想,系统设计原理架构如图1所示。
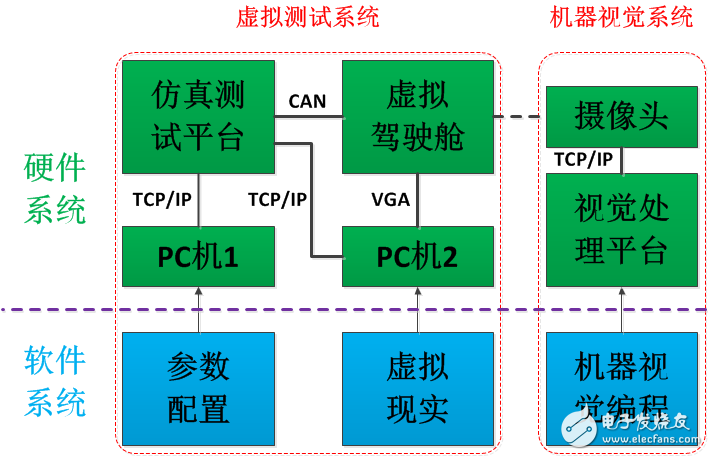
图1 系统设计原理架构图
如图1所示,整个平台分为虚拟测试系统和机器视觉系统两部分,两部分由各自的硬件及软件构成。