随着节能减排的有关政策标准相继出台,传统动力汽车逐渐向新能源汽车过渡。后者在机械与电气结构上明显比前者相对简单。通过将电机与电池进行系统整合来替换传统的发动机了。然而还有一个最大的问题困扰着电动汽车开发人员,除了变速箱结构得到了相应简化,传动系统还是非常复杂。目前,轮毂电机技术如果能够完全推广,将能取代汽车现有传动系统。
一、应用背景
众所周知,电池、电机、电控是新能源汽车必备的三大核心部件。当前的新能源汽车,均采用电机驱动系统将电能转化为机械能为汽车提供动力,因此驱动电机也是新能源汽车的核心技术之一。
图 1 新能源汽车主要系统架构
目前,集中电机驱动是电动汽车动力的主要驱动形式。虽然其优点很明显,即传动系统和控制系统的布置相对简单,但是也存在着一些问题。由于通过这类电机驱动的新能源汽车存在变速器、离合器、传动轴等机械传动部件,使得底盘结构更加复杂,随之带来的影响就是乘坐空间十分狭小,而且传动系统通过机械部件传递动力的同时会造成能量的损耗,造成能量利用率低下。
另外,这种传动系统在新能源汽车行驶过程中会产生较大的噪声,乘坐人员的舒适性并不能得到保证。国外的专家学者早年就开展了轮毂电机驱动的技术研究,从而优化了新能源汽车底盘中电机驱动的结构紧凑度、能量利用效率等问题;而国内相关院校和单位针对轮毂电机驱动技术的研究尚浅。目前,轮毂电机驱动技术已经在部分新能源汽车上应用并取得了较好的进展。
二、轮毂电机的概念
轮毂电机技术的起源可以追溯到20世纪元年,当时的费迪南德·保时捷在还没创立PORSCHE汽车公司时就研制出了前轮装备轮毂电机的电动汽车。上世纪70年代,轮毂电机技术运用在矿山运输车上取得不错的反响。另外,日本车企在关于乘用车轮毂电机技术方面的研究开展相对较早,基本占据领先地位。丰田和通用等国际汽车巨头也都对该技术有所涉足。与此同时,国内也逐渐诞生出研发轮毂电机技术的自主品牌厂商。
图 2 历史上的轮毂电机汽车
轮毂电机,通俗得讲就是将金属轮毂和驱动装置直接合并为整体的驱动电机,换句话说也就是将驱动电机与传动制动装置都合并到轮毂中,俗称“电动轮”,也叫作轮式电机(wheel motor)。其内部包含了轴承、定子和转子、小型逆变器等。
图 3 轮毂电机内部结构(Protean Drive TM)
三、轮毂电机驱动方式
(1)减速驱动
此驱动方式采用高速内转子电机,同时配置了固定传动比的减速器,功率密度相对较高,该电机的转速最高可达到10k r /min。
优点: 具有较高的比功率和效率,体积小,质量轻;减速结构增矩后使得输出转矩更大,爬坡性能好; 能保证汽车在低速运行时获得较大的平稳转矩。
缺点: 难以实现润滑,行星齿轮减速结构的齿轮磨损较快,使用寿命相对变短,不易散热,噪声比较大。
(2)直接驱动
此驱动方式采用低速外转子电机,电机的外转子直接与轮毂机械连接,电机的转速一般在1.5K r /min左右,无减速结构,车轮的转速与电机转速一致。
优点: 由于没有减速机构,使得整个驱动轮的结构更加紧凑,轴向尺寸也较前一种驱动形式小,传递效率更高。
缺点: 在起步、顶风或爬坡等需要承载大扭矩的情况时需要大电流,很容易损坏电池和永磁体,电机效率峰值区域小,负载电流超过一定值后效率下降很快。
四、国内外现状
(1)日本三菱
三菱公司(Mitsubishi)的MIEV技术始于2006年,并应用于其 MIEV样车上。目前该样车已经发展到了第三代。其中比较有代表性的是 Colt EV 及四驱跑车(LancerEvolution MIEV)。其中三菱的轮毂电机技术是日本东洋电机提供,该轮毂电机具有以下特点:逆变器采用 BOOST升压方案,且为每台电机由一台逆变器控制;电机采用永磁同步电机与轮毂的一体方案,保留原有的制动器及减震系统;东洋电机方案同样具有冷却的问题,采用自然冷却,且未批量推广。
图 4 系统示意图
(2)法国米其林
Michelin公司开发了动态减震轮毂电机系统。该系统在电动机和车轮之间增加了一套减震装置,从而提高了车辆的行驶平顺性和主动安全性。该公司最新公布的新一代轮毂电机系统的特点如下:轻量化和结构紧凑化,而且减少了系统质量;独特构造的悬挂装置,电机的悬挂装置是由直线状导块、螺旋弹簧、减震器、缓冲挡块构成,并位于车轴与电机之间,由直线导块控制电机的上下运动,螺旋弹簧则支承电机的重量,减震器用于减震;电机可靠性的提高,电机应用的密封技术以及部件耦合技术,使得轮毂电机在灰尘与雨水的特殊环境下具有更高的可靠性。
图 5轮毂电机驱动系统(Siemens / Michelin)
(3) Protean-E
Protean-E 轮毂电机采用分布式电机方案,即一体化的电机中包括8个共用母线小型永磁电机,环形电容旋转在电机内部,逆变器也同样分为8 组模块固定在轮毂上,Protean-E的电机系统散热采用自然冷却。
图 6 Protean-E电机装配图
(4)天津一汽
采用前舱集中驱动和后轮轮毂电机驱动的混联方案;外转子安装制动器后外面连接轮辋;原有的前轮驱动问题:采用避让原则,空间小;标称7.5k W的轮毂电机(实际额定5kW),最高车速可达到90 公里,同时由于转矩小,启动较慢。
五、电机控制原理
直流无刷控制的原理,控制器读取霍尔信号判断电机转子所在扇区,决定逆变桥桥臂的开关逻辑。方波控制实质上是比较简单的六步换向操作,任意时刻都存在一相定子绕组处于正向导通,即相电流正向流出;第二相定子绕组内反相导通,即相电流反向流入;第三组不通电。电磁力矩来源于定子绕组产生磁场吸引着转子磁场不断转动,若忽略磁阻转矩(表贴式永磁同步电机),定子绕组产生的交轴磁场产生了全部的电磁力矩;相反,当这定转子磁场重合时,即定子的直轴磁场对转子磁钢的相互作用,产生的电磁转矩为零。所以,需要不停的改变定子磁场的位置,来驱动转子磁钢的不断转动,控制定子磁场总是领先于转子磁
场一定角度,从而形成了永磁体的磁场总是在追赶绕组合成磁场。控制器检测转子磁场所在的扇区,然后控制绕组产生指向下一个扇区的磁场,控制转子转动一周只需改变定子绕组六次即可。但是,由于轮毂电机的极对数通常不为,所以每完成一个通电周期意味着转子仅仅是转动了电角度一圈,并未实现转子机械角度一周,所以转子转动机械角度一周需要的换向周期数和极对数相同。
这种控制主要实现电机的转速控制。通过读取霍尔传感器的位置信号,判断转子位置,同时电机转速控制器对电机的转速做闭环控制,由于电压与转速成正比,控制输出的相电压即可实现转速控制。这种控制方法通过简单的六步换向改变电枢磁场,引领转子转动,在任意时刻仅有两相绕组导通。具体控制流程如图:
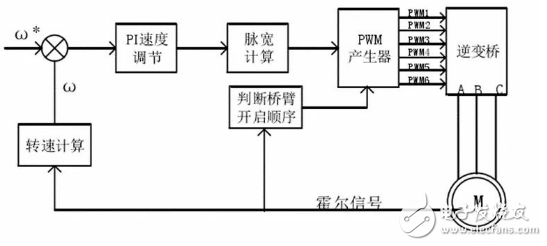
图 7 方波控制逻辑框图
方波控制采用霍尔元件作为位置传感器。3个霍尔分别安置在电角度为0°,120°和240°的位置,如图8所示,将360°电角度分割成6个扇区。控制器检测转子所在扇区,控制电枢磁场指引转子转向下一个扇区。
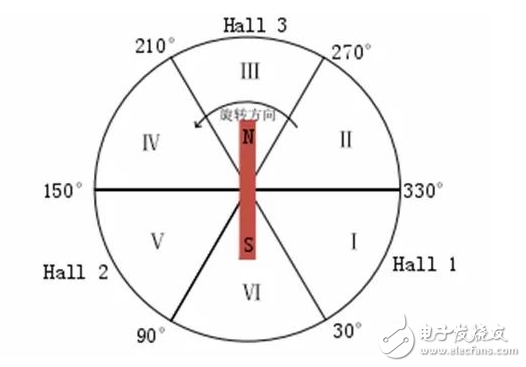
图 8 扇区示意图
六、电机驱动漏电现象
原因大致有以下几类:
电机驱动漏电现象
主要
分类
绕组受潮使绝缘电阻下降
电动机长期过载运行
金属异物侵入绕组内部损坏绝缘
重绕定子绕组时绝缘损坏碰铁心
绕组端部碰端盖机座
定、转子磨擦引起绝缘灼伤
引出线绝缘损坏与壳体相碰
有害气体腐蚀
七、电流检测方案
目前来说,运用霍尔传感器(Hall Current Sensor)或电流互感器(Current transformer)对功率变换器上直流母线电流进行反馈检测的方式具备多方面的局限性。因为通过主开关器件的电流普遍相对较大 ,所采用的霍尔器件或电流互感器的额定参数也必须较大,此时方案体积大、成本高。 另外,其不便于实现功率变换器的高功率密度 。
本文介绍一种新颖的方案——基于半导体器件构成的电流检测电路 ,其可以直接在功率变换器的控制PCB板上布置电路, 不仅成本低廉 ,体积小,安装方便 ,而且性能良好, 还可以同功率变换器固化在一起形成专用集成电路(ASIC)。
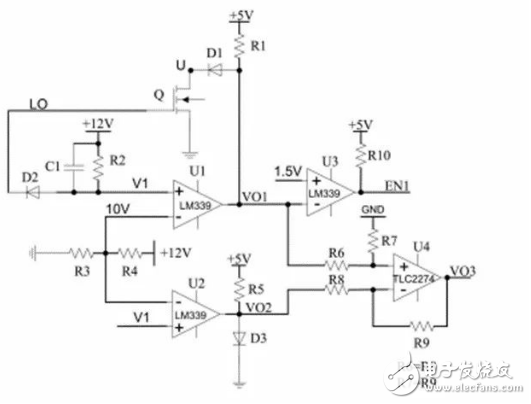
图 10 基于MOSFET的电流检测电路
电路工作原理 (如图10所示):
下桥的驱动信号为 。
(1)当 为时, 下桥 MOSFET管的为关闭状态 ,右端信号点为二极管的管压降, 此时 ,的正向输入端为, 负向输入端电压为,此时输出为低电平 ,输出也为低电平 ,是集电极开路输出方式, 同样存在导通压降的问题 , 故将信号减去信号, 消除因导通压降引起的检测误差,起到消除输入误差的作用。
(2)当为时, 下桥 管为导通状态 , 右端点信号为 , 此时,的正向输入端为, 负向输入端电压为, 输出为高阻态 ,的电压为 内阻上的压降加上快恢复二极管的压降 , 同时,输出也同样为高阻态 ,的电压为二极管的压降。通过运放组成的减法电路将信号减去信号, 可得到内阻上的压降。
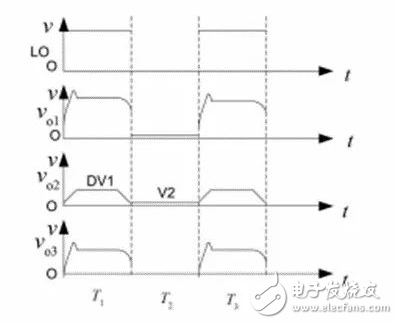
图 11 各点对应的波形图
开关管管压降和电流检测电路相关点的波形分析如图 3所示。采用两两导通方式中, 在电动或制动状态 ,总有一个下桥臂处于工作状态 ,故 3个下桥臂的导通压降之和约等于电机绕组的平均电流。
和是导通时刻 , 是关断时刻 ,是导通时的管压降, 为导通压降 。在该检测电路中,起到是过流保护的功能 , 当的电压大于时 , 的输出为低电平(过流信号)。