转台是广泛应用于航空、航天、兵器、航海等领域的光机电一体化设备,车载转台系统凭借其优异的机动性能,得到了广泛应用。然而与陆基转台不同的是,即使是落地测量,地表的差异、周围环境的变化都将导致车载转台的水平度发生明显改变,水平基准的改变则会影响整个转台的精度,为此必须对转台的水平机构进行调整。
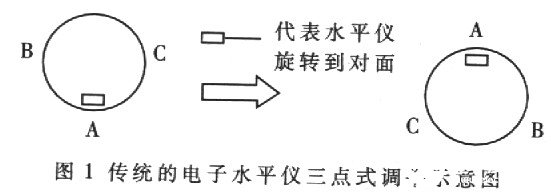
传统的转台调平方法是将一台数字式电子水平仪以平行于B、C连线的方向摆放到转台A点上,如图l所示,测量A处的水平值,然后将转台旋转180°,再一次测量A处的水平值,两次测量值的差值即为B处和C处的水平值差,通过调整B或C点的调平机构,使得三点的水平值达到相同。这样,一个由三点所确定的转台被视为水平。
这种传统的调平方法虽然在陆基转台上应用起来非常方便,可是要在车载转台上仍采用该方法,就会给工作带来很多的不便。图2为电子水平仪应用在车载转台系统的工作模型。工作过程中的不足点具体体现在以下三方面:

(1)原有电子水平仪的测量底座对温度的变化较为敏感,导致不同温度下的测量结果有较大差异,所以气候条件恶劣、周围环境干扰大会对水平仪的测量结果产生很大影响;
(2)工作过程中,因水平仪安装在转台上,会随着转台工作位置的不断变换而发生改变。因此调平人员不能随时看到水平仪的读数,无法掌握恰当的调平时刻;
(3)调平时,调平人员要同时兼顾在载车上读数与载车下调平的双重工作.这样势必会影响调平的精确度和快速性。
因此,为了克服传统调平方法应用在车载转台上时产生的种种弊端,提出了对车载转台水平度进行动态监测的方法。该方法应用到目前的车载转台设备中,保证了车载转台的水平精度,对提高车载设备的机动性能起着很重要的作用,并且对今后的车载自稳定系统的研究也有着深远的意义。
1 新型动态监测系统的工作原理
对车载转台的水平度进行动态监测,其主导思想就是将车载设备的水平度通过数字式电子水平仪同步传送至中心机和载车侧壁的数码管上,使得在中心机上就可以实时监测转台的水平度,同时高平人员调平时在载车侧壁就可以看到水平仪测量出的水平值。该方法的实现主要是根据数字式电子水平仪会输出与测量结果成正比的模拟电压量的原理,只要将该电压量进行相应的模数转换即可。具体实现方法如下:
增加一台电子水平仪,将两台电子水平仪全部密封固定在转台上方或下方,即可避免外界环境对测量结果的影响,另外将水平仪的测量值输出到两个方向同步显示,一部分将显示值引导到主控软件的界面上,另一部分同步到载车的侧壁上。具体的同步方式如图3所示。
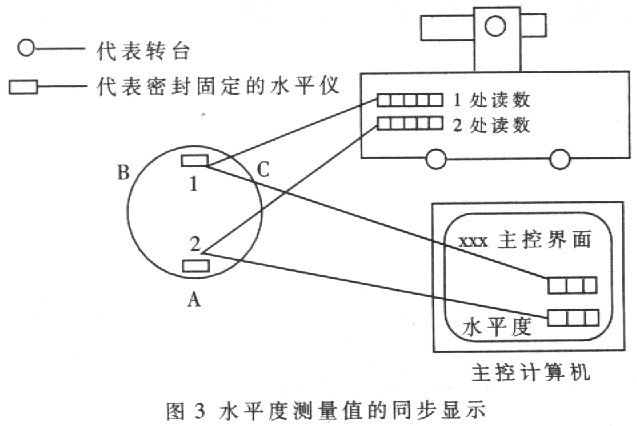
这样,一方面调平人员可以根据中心机界面上水平度的实时显示来监测车载转台的水平度,以判断是否需要调平;另一方面,在词平的过程当中,调平人员可在车下根据载车侧壁的显示值进行调平,提高了调平的精确度和快速性。
2 系统的硬件实现
2.1 硬件结构
系统的硬件结构框图如图4所示,由水平仪、AID转换芯片ADl674、DSP、BCD-7段锁存/译码/驱动器MCl4513、外部电压基准MAX6133、MAX488接口芯片和中心机等部分组成。

2.2 硬件工作过程分析
在该系统中,A/D转换和数码显示是相对较为重要的部分,下面介绍其具体的工作过程。
2.2.1 A/D转换
当水平仪自身显示值为1时,它会输出lmV的电压值,因此该设计中ADl674采用了外部电压基准,12V电压经由MAX6133后输出4.096V的基准电压,于是12位MD转换器在转换过程中,lmV对应一个字节,这样不但简化丁中间的数据运算过程,而且减少了由于运算带来的误差。ADl674将来自水平仪的模拟电压信号转换成12位的数字信号后,通过DSP的数据总线传送到DSP中,DSP进行相应处理之后,输出相应的控制信号驱动载车侧壁的数码管,使之与水平仪同步显示相同的测量值。
2.2.2 数码显示
DSP将从A/D转换器读取回来的数据在自身的寄存器内部进行十进制数据转换之后,再由IOPC口输出显示数字的BCD码到BCD-7段锁存,译码,驱动器MCl4513中,由剩余闲置的I/O口产生BCD码输入锁存信号。当BED码被锁存后,经7段译码,相应位的数码管将产生相应的显示值。与此同时,DSP将数据从其自身串口发出,通过MAX488芯片转换成PS422信号后传送至中心机,并在中心机的界面上实时显示。图5为水平仪同步显示部分的电路原理图。

3 软件设计
该系统软件部分主要包括数码管显示和中心机实时监控两部分。
3.1 数码管显示程序设计
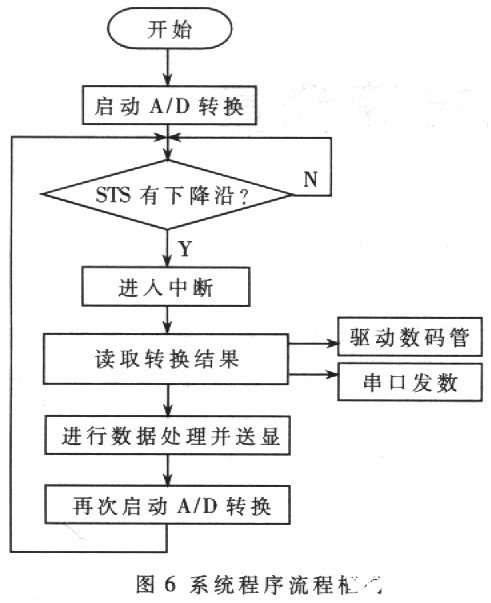
数码管显示程序主要是采用DSP进行控制,具体包括以下几部分:主程序、中断初始化程序、十进制子程序、串口发数子程序和显示子程序。其中,主程序中开始启动A/D转换并等待中断;中断初始化程序主要负责设置外部中断的响应方式、外部中断的开启、总中断的开启;十进制子程序把12位二进制数据转换成相应的十进制数据;串口发数子程序将从A/D转换器读取回来的数据量通过串口以固定波特率发送到中心机;显示子程序将要显示数字的BCD码发送到MCl4513并置位相应锁存位。系统程序流程框图如图6所示。
3.2 实时监控程序设计
实时监控程序的任务是增加两个对水平度进行实时显示的窗口,该窗口将从DSP传送过来的RS422信号转换为水平度的测量值显示出来,采用Visual C++实现,具体包括以下几个方面:显示窗口的创建、串口通信、水平度在窗口中的同步显示。实时监控窗口如图7所示。

4 实验结果及分析
将其中一个电子水平仪输出在显示界面和数码管上的值与水平仪自身所带的显示屏显示结果进行对比,采用定点等时间间隔连续测量法进行检测,同时记录下当时的显示界面、数码管显示及水平仪显示的数值。表l记录了两小时之内的实验数据。
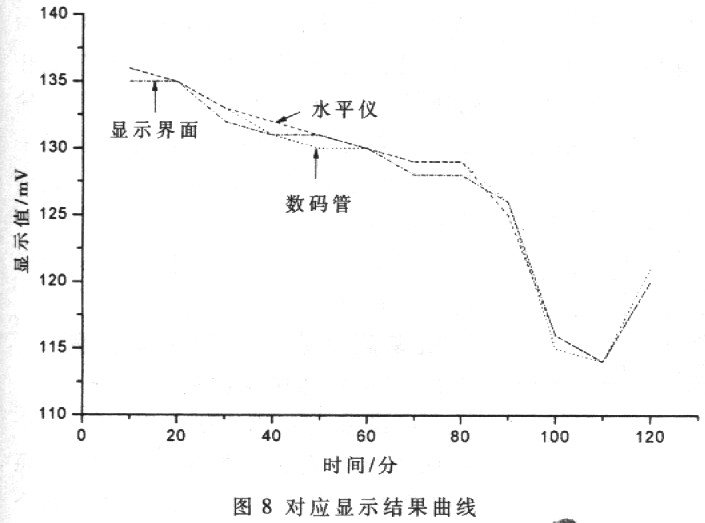
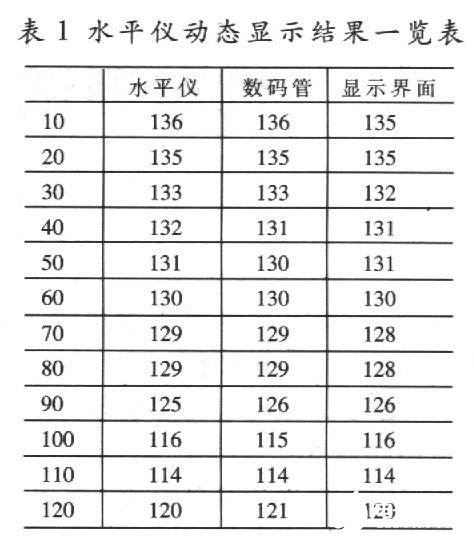
根据显示数据绘制的曲线如图8所示。表l和图8的对比结果表明,采用该设计方法可以使得水平仪、数码管以及显示界面的同步显示结果误差仅在一个码值之内(2角秒),精度完全满足车载转台的水平度控制要求(10角秒以内),实现了在中心机上实时监测载车系统的水平度,并且调平人员可根据载车侧壁的数码显示值更加直观、快捷地调整载车车体,使之水平。
责任编辑:gt